BIOMECHANIKA ÚPOLOVÝCH SPORTŮ A BOJOVÝCH UMĚNÍ
Význam biomechaniky v úpolových sportech a bojových uměních
Objasněme si, jaký má biomechanika význam v úpolových sportech a bojových uměních. Při prováděné sportovní aktivitě řeší sportovec konkrétní pohybové úkoly, buď jednoduché, nebo složité, v souladu s jeho možnostmi, v souladu s biomechanickými zákonitostmi pohybu. Řešení probíhá na základě neurofyziologických mechanizmů řízení pohybu s využitím dalších předpokladů kondičních, somatických či psychických, v souladu s pravidly a je označováno termínem sportovní technika. Vývoj techniky byl zpočátku záležitostí spekulativní, empirickou, byl určován praktickou zkušeností. Snahu o objektivní pohled na řešení určitého pohybového úkolu projevila řada odborníků z řad lékařů neurologů, fyziologů, anatomů. Výsledky jejich práce shrnuje kineziologie, tj. věda studující pohyb z biologického aspektu, jeho biologické podmínky, průběh a příčiny s přihlédnutím k mechanickým zákonitostem, jako výsledek práce svalů a ostatních systémů. Takovéto pojetí je pro vysvětlení celé šíře problematiky nedostačující. Je třeba chápat pohyb i z aspektu fyzikálního, tedy jako změnu místa hmoty těla v prostoru a čase. Těmto požadavkům vyhovuje právě biomechanika.
Technika se rozvíjí v rámci jednotlivých sportovních specializací a její osvojení se děje v procesu tzv. motorického učení respektive v jeho fázích. „Do složitého komplexu osvojování významně zasahují pohybové a intelektové schopnosti, technika je především záležitostí řízení motoriky. Cílem je dosažení dokonalé efektivní organizace sportovní činnosti, tj. takové uspořádání pohybu v prostoru a čase, které vede k úspěšnému řešení pohybového úkolu. Úspěšnost je dána dokonalou souhrou zúčastněných svalových skupin řízenou nervovou soustavou“ (Dovalil a kol., 2002).
Učením získaný předpoklad k efektivnímu řešení pohybového úkolu se označuje termínem pohybová dovednost (PD). V podstatě se dá říci, že se jedná o plánovitě vytvořenou vazbu vzniklou na podstatě opakování činnosti a jejího upevnění (Kučera, Dylevský, 1999). PD je mj. vyjádřením symbiózy vnějších projevů motoriky a vnitřních neurofyziologických mechanismů. Obdobně je možné rozlišit techniku na tzv. vnější a vnitřní.
Vnější technika se projevuje jako organizovaný sled pohybů a operací sdružených v pohybovou činnost. Lze ji posuzovat na základě vizuálního pozorování a hodnotit kvantitativními charakteristikami, např. popisem pohybu těla a jeho segmentů v prostoru a čase bez zkoumání příčin pohybu (směr, dráhu pohybu, rychlost, zrychlení aj.) nebo kvalitativními charakteristikami pohybového projevu (přesnost, plynulost, rytmus, přizpůsobivost, stálost aj.).
Vnitřní technika je tvořena neurofyziologickým základem sportovní činnosti mající podobu zpevněných a stabilizovaných pohybových vzorců a programů a jim adekvátních koordinovaných systémů svalových kontrakcí a relaxací. Nejširším základem, na němž je technika založena, jsou pohybové schopnosti (PS). Podíl PS na technice a jejím utváření v různých typech sportovních výkonů je různý a specifický. Prostřednictvím PS se v PD uplatňují různé funkce vnitřních orgánů, včetně energetického zabezpečení. Rozbor vnitřní techniky spočívá v odhalování skrytých příčin pohybu a mechanismu jeho řízení. Užívanými metodami jsou především dynamografie a elektromyografie, které pro svoji náročnost jsou pro praxi méně využívané a jsou vhodné pro laboratorní šetření. Pohybové schopnosti jsou podmíněny úrovní metabolismu, tj. úrovní a podílem jednotlivých energetických zdrojů na zajištění sportovního výkonu, tedy z aspektů fyziologických je každá pohybová aktivita jištěna určitým množstvím energie.
Vedle termínu technika bývá také používán termín „styl“. Tím rozumíme „individuální pojetí techniky vyplývající z anatomicko-fyziologických a psychických předpokladů určitého jedince a projevující se osobními znaky v technice, příznačnými jen tomuto jedinci“ (Novák, 1970).
Příčiny pohybu (vnitřní techniku) i strukturu pohybu (vnější techniku) zkoumá z fyzikálního hlediska biomechanika. Ať si to už sportovec uvědomuje, nebo neuvědomuje, každý jeho pohyb je ovlivňován fyzikálními zákonitostmi, jevy, silami. Základním úkolem biomechaniky je tedy objasnit a vysvětlit příčiny a průběh dané pohybové struktury. Na základě mechanického přístupu biomechanika určuje, jaké řešení pohybového úkolu, tedy jaká technika je z hlediska ekonomičnosti a efektivnosti pohybu optimální. S ohledem na individuální předpoklady sportovce biomechanika pomáhá specifikovat individuální styl sportovce. Pochopení dané techniky je jak pro sportovce, tak zejména pro pedagoga či trenéra podstatným krokem k úspěchu. Biomechanika pomáhá odhalit chyby sportovce. Zejména ve výkonnostním sportu se stále více využívají exaktní biomechanické analýzy techniky daného sportovce, což umožňuje nalézt ve struktuře pohybu nedostatky často těžko rozpoznatelné pouhým okem. Znalosti mechanických principů v bojových uměních a úpolových sportech pomáhají vybrat vhodná specifická cvičení v rámci tréninkového procesu a zpřesnit metodické postupy. Biomechanika má však také zdravotní význam. Tady čerpáme z poznatků mechanických vlastností jednotlivých tkání pohybového aparátu člověka. Na základě podrobné biomechanické analýzy daného pohybu určujeme, kdy už je organismus mechanicky zatěžován na hranici svých možností, čímž se snažíme předejít zraněním.
Fyzikální základ biomechaniky
Biomechanika čerpá z fyzikálních poznatků, zejména z mechaniky. V této kapitole si přiblížíme základní fyzikální vztahy, zákonitosti a jevy. Pro lepší pochopení a osvojení si schopnosti umět tyto poznatky aplikovat v praxi jsou obecné poznatky doplněny konkrétními příklady z oblasti úpolových sportů a bojových umění.
Mechanika je obor fyziky, který se zabývámechanickým pohybem, tedy přemísťovánímtěles vprostoru ačase a změnamivelikostí a tvarů těles. Podle toho, z jakého hlediska pohyb sledujeme, můžeme mechaniku rozdělit na kinematiku a dynamiku.
Kinematika popisuje pohyb těles bez ohledu na příčiny tohoto pohybu. Zabývá se tím, jak pohyb vypadá v čase a v prostoru, jde o vnější časoprostorové charakteristiky pohybu. Kinematika se tedy zaměřuje na sledování prostorových a rychlostních změn, např. dráhy, úhly, rychlosti, zrychlení.
Dynamika studuje příčiny pohybu. Vyšetřuje vzájemné působení těles (síly), které vedou ke změnám pohybu tělesa. Částí dynamiky je statika zabývající se podmínkami rovnováhy.
Fyzikální veličiny
Fyzikální veličina vyjadřuje vlastnosti, stavy a změny hmotných bodů, jejichž hodnotu lze měřit nebo spočítat. Hodnota fyzikální veličiny je plně určena hodnotou a měřicí jednotkou. Číselná hodnota nemá sama o sobě žádný smysl, neboť veličinu můžeme uvádět v různých jednotkách, proto je nutné vždy uvádět, jakou jednotku jsme zvolili.
Fyzikální veličiny můžeme rozdělit do dvou skupin:
- Skalární veličiny (tj. skaláry) jsou plně určeny číselnou hodnotou a jednotkou, např. čas, hmotnost, dráha, energie,…
-
Vektorové veličiny
(tj. vektory) jsou určeny nejen svou velikostí a jednotkou, ale i směrem, např. síla, okamžitá rychlost, hybnost,… V písmu vyznačujeme vektorové
veličiny polotučnou kurzívou a, b, c nebo šipkou nad příslušným
písmenem:

Při biomechanickém studiu pohybů lidského těla budeme s vektory počítat. Pro naše potřeby využijeme především skládání a rozkládání vektorů.
Význam směru u vektorových veličin při analýze pohybů úpolových sportů si ukážeme na příkladu bočního kopu (yop chagi) v taekwondu, kterým sportovec přeráží desky. Okamžitá rychlost paty kopající nohy se v průběhu kopu zvyšuje, před dopadem musí být maximální. Trajektorie paty má zprvu tvar oblouku (pata se postupně dostává do výšky desek), poté má tvar přímky, rovnoběžné s podložkou, procházející středem desek. Okamžitá rychlost ve směru kolmém k deskám je zprvu menší než výsledná okamžitá rychlost, ale před dopadem by si tyto rychlosti měly být rovny, tedy veškerá rychlost by měla směřovat kolmo proti deskám (obr. 1). Obrázek 2 ukazuje chybné provedení, kdy se pata blíží k deskám zespodu. V tomto případě se rychlost při nárazu rozkládá a účinná je pouze složka rychlosti kolmá k deskám.
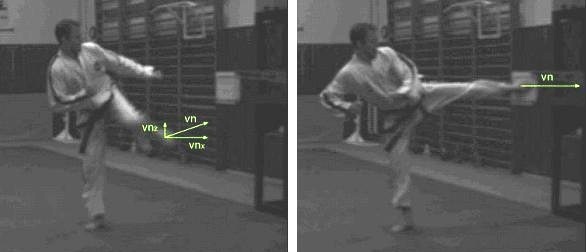
Obr. 1 Rychlosti paty při bočním kopu (vn- absolutní okamžitá rychlost, vnx – okamžitá rychlost ve směru osy x, vny - okamžitá rychlost ve směru osy y)
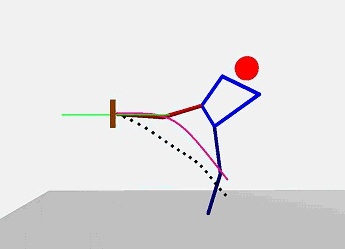
Obr. 2 Trajektorie paty kopající nohy při chybném provedení (růžová – optimální trajektorie, černá – špatné provedení)
Kop musí směřovat přímo na svůj cíl, tedy kopající noha před nárazem musí směřovat po přímce kolmé na rovinu, v níž jsou desky. Musí to platit nejen ve vertikální rovině, ale i v rovině horizontální. To znamená, že noha by do desek neměla narážet ze strany, ale svírá s přední plochou desek pravý úhel. V tom případě bude veškerá hybnost maximálně využita. Obrázek 3 ukazuje správné a chybné provedení konečné fáze bočního kopu.
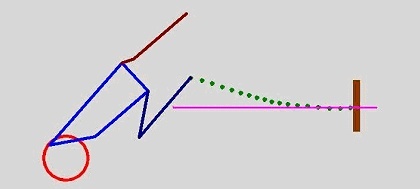
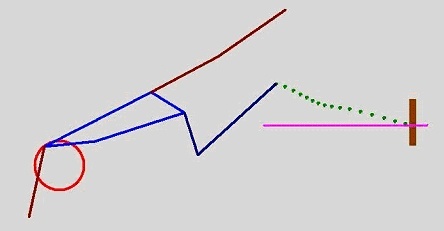
Obr. 3 Trajektorie paty kopající nohy v horizontální rovině (pohled z půdorysu). První obrázek ukazuje optimální provedení, druhý chybné.
Kinematika
Poloha a pohyb tělesa
Při určování polohy tělesa a jejích změn je důležité, vzhledem k čemu, k jakému tělesu tuto polohu vztahujeme. Soustava těles, ke kterým polohu a pohyb tělesa vztahujeme, se nazývá vztažná soustava. Nejčastěji volíme za vztažnou soustavu povrch Země nebo tělesa pevně spojená s povrchem Země. Příkladem může být pohyb judisty při pádu, kdy pohyby jednotlivých segmentů vztahujeme k podložce. Jindy však pohyb jednotlivých segmentů těla vztahujeme k tělu, přesněji k těžišti těla, takto je možné řešit např. pohyb segmentů kopající dolní končetiny. Díky specifičnosti úpolových sportů, kdy dochází ke kontaktu dvou osob, sledujeme někdy pohyb jednoho vzhledem k druhému, např. při hodu soupeře v judu sledujeme pohyb přehazovaného judisty vzhledem k útočníkovi. Hodnoty sledovaných charakteristik pohybu tak závisí na volbě vztažné soustavy. Platí tedy, že pohyb a klid těles je relativní.
Pohyb posuvný a otáčivý
Při biomechanickém studiu pohybů hmotných těles pozorujeme různě složité pohyby. Vždy však jde o pohyb posuvný (translační), otáčivý (rotační) nebo o pohyb složený z těchto dvou. Při posuvném pohybu opisují všechny body tělesa rovnoběžné dráhy a v daném okamžiku mají stejnou rychlost. Při otáčivém pohybu opisují všechny body tělesa soustředné kružnice se středem v ose otáčení a mají v daném okamžiku stejné úhlové rychlosti.
Při otáčivém pohybu se rozlišuje pohyb kolem pevné osy nebo kolem okamžité (volné) osy. Pevná osa má stálý směr, nemění svou polohu v prostoru. Naopak volná osa mění při pohybu svou polohu v prostoru, často prochází těžištěm těla. V úpolových sportech a bojových uměních se častěji setkáváme s volnou osou otáčení. Kolem této osy se otáčí např. judista při hodu nebo karatista při otočce před úderem.
U pohybů v kloubech mluvíme o cirkumdukčním (krouživém) pohybu.
Trajektorie hmotného bodu
Při mechanickém pohybu prochází hmotný bod postupně různými polohami. Spojením těchto poloh dostáváme trajektorii - geometrickou čáru, kterou těleso při svém pohybu opisuje.
Podle tvaru trajektorie lze rozlišit pohyby
- křivočaré - trajektorií je obecná křivka, a to jak otevřená (např. parabola) tak i uzavřená (např. elipsa, kružnice).
- přímočaré - trajektorií je přímka.
Dráha hmotného bodu
Délka trajektorie se nazývá dráha. Tato skalární veličina vyjadřuje, jakou vzdálenost hmotný bod opíše za určitou dobu a značí se obvykle s.
Dráha je funkcí času, což zapisujeme
 .
.
Rychlost
Rychlost je charakteristika pohybu, která nám sděluje, jakým způsobem se mění poloha tělesa (hmotného bodu) v čase. V praxi rozlišujeme průměrnou a okamžitou rychlost.
Průměrná rychlost vp je skalární veličina, která udává, jak velkou dráhu těleso urazí za jednotku času.

Základní jednotkou je metr za sekundu (m/s nebo m·s-1). Používáme však také jednotku kilometr za hodinu (km/h nebo km·h-1). Vztah mezi těmito jednotkami je 1 m.s-1 = 3,6 km.h-1. Průměrná rychlost nám neříká nic o tom, jak se velikost rychlosti během pohybu měnila, proto je pro podrobný popis průběhu pohybu nedostatečná. Většinou nás zajímá okamžitá rychlost v jednotlivých mikrofázích pohybu, její výraznější změny, minimální a maximální dosažená rychlost.
Okamžitá rychlost v je vektorová veličina, která určuje, jakou rychlost má těleso v daném časovém okamžiku. Tento okamžik je velmi malý časový interval ∆t, během kterého těleso urazí velmi malý úsek dráhy ∆s. Pro velikost okamžité rychlosti platí
 nebo
nebo

Okamžitá rychlost má směr tečny k trajektorii pohybu tělesa (obr. 4).
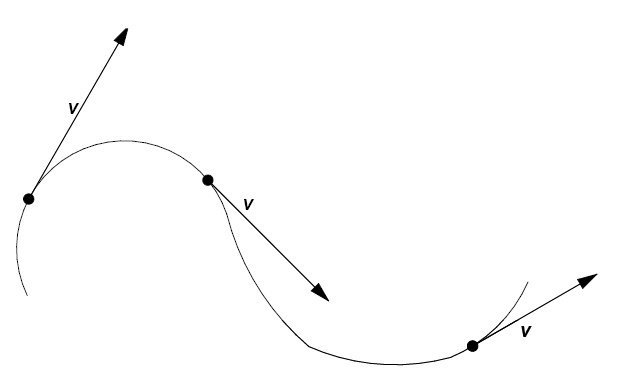
Obr. 4 Směr okamžité rychlosti tělesa
V úpolových sportech je důležitá především dosažená maximální rychlost pohybu daného segmentu, která je jedním z limitujících faktorů účinného úderu. Podstatná je tedy velikost této okamžité rychlosti a také moment, ve kterém jí bylo dosaženo. Optimální je nabytí této rychlosti těsně před nárazem do cíle. Vyšší rychlost umožňuje získat vyšší energii a hybnost, kterou útočník může vložit do úderu. Mnoho studií prokázalo, že pokročilejší karatisti, taekwondisti a další jsou schopni vyvinout vyšší rychlosti kopů a úderů než začátečníci.
Pokročilí cvičenci bojových umění nesměřují svůj úder paží do cíle, který je na povrchu tělesa, na které útočí, ale uvnitř něho. Například u přerážení desek je tento cíl za deskou. Toto specifické zaměření pozornosti zajistí, aby ruka nezačala zpomalovat dříve, než zasáhne cíl, což je častou chybou začátečníků. Mají strach ze zranění, a tudíž nejsou schopni potřebné psychické koncentrace, naopak jsou váhaví, nerozhodní a to se projeví na technice provedení. Vysoká rychlost pohybu je limitujícím faktorem úspěšného úderu. Už v roce 1979 (Feld a kol.) bylo pomocí vysokofrekvenční kamery zaznamenáno, že rychlost zápěstí při karatistickém úderu dosahuje svého maxima krátce před tím, než se loket dostane do maximální extenze. Z časového hlediska tento moment nastává v 70 – 80 % celkového času úderu. Zápěstí do tohoto okamžiku urazí přibližně 75% délky plně extendované paže, což je asi 10 – 14 cm před plnou extenzí (obr. 5). Protože ruka se již nemůže pohybovat vpřed víc než na délku paže, její rychlost musí být při úplné extenzi rovna nule. Z toho plyne, že ruka musí začít zpomalovat o něco dříve.
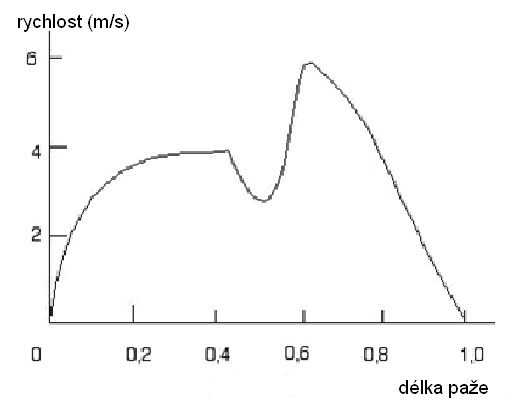
Obr. 5 Průběh rychlosti zápěstí při karatistickém úderu (převzato od Feld a kol., 1979)
Kinezilogická analýza nabízí vysvětlení této křivky, zejména poklesu rychlosti zhruba v polovině dráhy. Na začátku je ruka v supinaci. V první fázi pohybu konají nejdůležitější práci svaly biceps brachii a musculus pectoralis. Zhruba v polovině se přenáší hlavní úkol z m. bicepsu brachii na m. triceps brachii a jelikož jde o antagonisty, tedy svaly s opačnou funkcí, je pro tuto změnu aktivních svalů charakteristický pokles rychlosti. V následující fázi zabírá více svalových skupin (m. biceps brachii se protahuje, aktivní je m. triceps brachii, m. deltoideus a m. serratus), díky nimž rychlost roste až do svého maxima. Poté zůstávají všechny tyto svaly v napětí a rychlost prudce klesá.
Pro jednotlivé nejběžnější údery a kopy v karate byly naměřeny tyto maximální rychlosti:
Tab. 1 Maximální rychlosti vybraných úderů a kopů (upraveno dle Feld a kol., 1979)
|
Technika |
Maximální rychlost (m/s) |
|
přímý úder (forward punch) |
5,7 – 9,8 |
|
kladivový úder (hammer-fist strike) |
10 – 14 |
|
zadní úder (reverse punch) |
5,3 – 8,1 |
|
sek malíkovou hranou (downward knife-hand strike) |
10 – 14 |
|
obloukový kop (roundhouse kick) |
9,5 – 11 |
|
kop s obratem (wheel kick) |
7,3 – 10 |
|
kyvadlový přímý kop (front snap kick) |
9,9 – 14,4 |
|
boční kop (side kick) |
9,9 – 14,4 |
Kim a kol. (2006) srovnávali z kinematického hlediska provedení základních kopů taekwonda. Ačkoli jsou v taekwondoo různé kopací techniky, je možné je rozdělit na tři rozdílné styly kopů v závislosti na kinematické charakteristice kopu. Kopy švihem (swing kicks) s využitím pohybu dolní končetiny po části kružnice se používají k získání maximální rychlosti nohy při nárazu. Kopy trčením dolní končetiny (thrust kicks) jsou používány k vyvinutí značných sil při nárazu. Kombinovaný kop je využíván k vytvoření obojího – vysoké rychlosti i značné síly. Autoři analyzovali tyto kopy: přímý kop (front kick - FR), obloukový kop (roundhouse kick - RH), boční kop (side kick - SD), zadní kop (back kick - BA), háková kop (hook kick - HO), a zadní hákový kop (back hook kick - BH) (obr. 6).
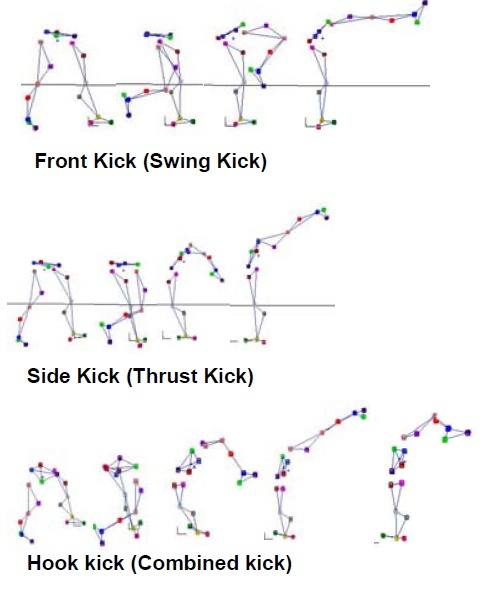
Obr. 6 Kinogramy švihového kopu (přímý kop), kopu trčením (boční kop) a kombinovaného kopu (hákový kop) (převzato od Kim a kol., 2006)
Výsledky ukázaly významně vyšší rychlosti u obloukového kopu (13.9 ± 0.72 m/s) než u SD, BA a HO. Rychlost bočního kopu (8.55 ± 0.53 m/s) byla významně nižší než FR a RH, jak ukazuje obrázek 7.
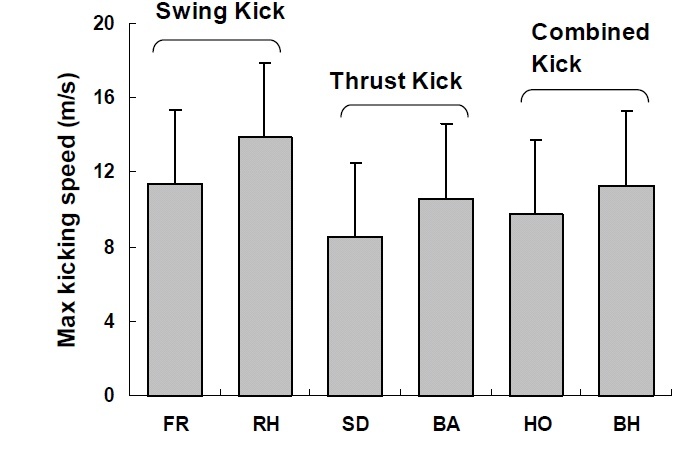
Obr. 7 Graf rychlostí vybraných kopů v taekwondu (převzato od Kim a kol., 2006)
Tato studie ukázala, že švihové kopy (FR and RH) všeobecně dosahují nejvyšších rychlostí ze všech typů kopů taekwonda. Švihové kopy používají zpravidla otevřený kinematický řetězec při snaze maximalizovat lineární rychlost distálního konce (Putnam, 1991). Z tohoto důvodu mají výhodu při dosahování vysoké mechanické energie. Kopy trčením (SD and BH) jsou vykonávané opačným otáčivým momentem mezi kyčlí a kolenním kloubem. Mají nejpomalejší úderovou rychlost, ale síla významně narůstá díky koaktivaci flexorů a extenzorů kyčelního a kolenního kloubu. Kombinované kopy (HO a BH) mají jak přiměřenou rychlost tak i koaktivaci flexorů a extenzorů. Proto mají v určitém poměru obojí – rychlost i sílu. Nejvyšší rychlost byla naměřena u obloukového kopu, který je pro tuto přednost s oblibou užíván.
Chuang a kol. (2005) provedli studii, ve které srovnávali kinematické charakteristiky téhož úderu při zásahu různých cílů – kartonová deska o hmotnosti 0,2 kg, malý boxovací pytel o hmotnosti 9,2 kg a velký boxovací pytel o hmotnosti 29,2 kg. Měření ukázala, že rychlost zápěstí, při které došlo ke kontaktu s cílem, byla rozdílná. Největší rychlost byla průměrně naměřena u kartonové desky (6.98 ± 0.72 m/s), nižší v malého pytle (6.06 ± 0.68 m/s) a nejmenší při úderu do velkého pytle (5.43 ± 0.82 m/s). Také doba kontaktu se v jednotlivých případech lišila. Nejkratší doba kontaktu byla zjištěna pro kartonovou desku (0.03 ± 0.00 s), delší u malého pytle (0.10 ± 0.01 s) a nejdelší u velkého pytle (0.14 ± 0.05 s).
Obdobnou studii provedl Hwang (1989), když porovnával rychlosti u kopu na cíl a kopu bez konkrétního cíle u pokročilých taekwondistů. Byly zjištěny rozdíly, při kopu na cíl bylo dosaženo vyšší rychlosti (11 m/s) než při kopu bez cíle (9 m/s). Snížení se projevilo zejména na horizontální složce rychlosti.
Zrychlení
Zrychlení a je vektorová veličina, která popisuje, jakým způsobem se mění vektor rychlosti tělesa v čase. Jednotkou zrychlení je metr za sekundu na druhou (m/s 2 nebo m·s-2). Zrychlení definujeme vztahem
 ,
,
kde ∆t je velmi malé.
Jestliže při zrychlení dochází ke změnám rychlosti, jakožto vektoru, může se měnit jak velikost rychlosti, tak i směr rychlosti. Vektor okamžitého zrychlení tak můžeme rozložit na tečné a normálové zrychlení (obr. 8).
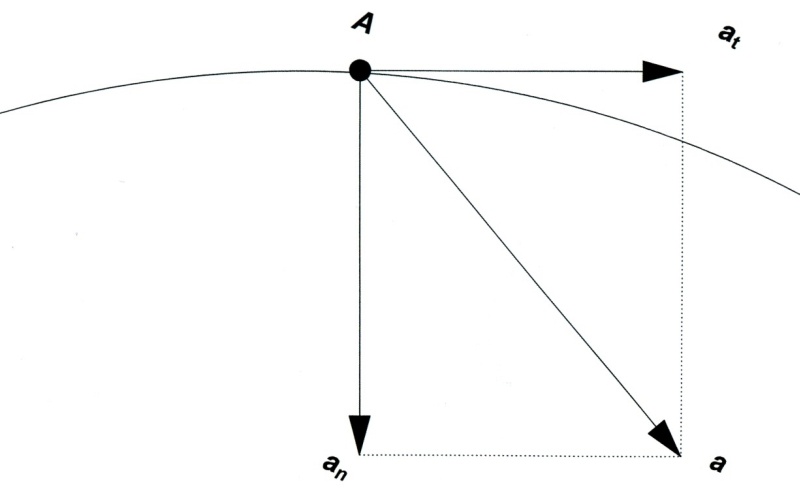
Obr. 8 Tečné a normálové zrychlení
Velikost tečného zrychlení at vyjadřuje změnu velikosti rychlosti. Tečné zrychlení má směr tečny k pohybu. U přímočarého pohybu může mít tečné zrychlení stejný směr jako vektor rychlosti, v tom případě se jedná o pohyb zrychlení. Pokud má vektor zrychlení opačný směr než vektor rychlosti, jde o pohyb zpomalený (neboli zrychlený se záporným zrychlením). Zrychlení se tedy projevuje změnou velikosti rychlosti.
Velikost normálového zrychlení an vyjadřuje změnu směru rychlosti. Pohybuje-li se těleso přímočaře, je an = 0. Pokud se však mění směr vektoru rychlosti, těleso tedy vykonává křivočarý pohyb, je přítomno normálové zrychlení. Tato složka zrychlení je kolmá na tečné zrychlení, má směr normály (směřuje do středu otáčení). V určitých případech jej také nazýváme dostředivým zrychlením ad.
Výsledný vektor zrychlení zapisujeme a = at + an a jeho velikost vypočítáme pomocí Pythagorovy věty
 .
.
Klasifikace mechanických pohybů
Mechanické pohyby lze dělit podle různých kritérií.
Podle tvaru trajektorie rozlišujeme pohyb:
- přímočarý
- křivočarý
Podle dimenze prostoru, v němž pohyb probíhá, lze pohyb dělit na:
- lineární - všechny body tělesa se pohybují po rovnoběžných přímkách
- rovinný - všechny body tělesa se pohybují v navzájem rovnoběžných rovinách
- prostorový - jednotlivé body tělesa vytváří při svém pohybu prostorové křivky
Podle velikosti rychlosti lze pohyby dělit na:
- rovnoměrné - Velikost rychlosti se při rovnoměrném pohybu s časem nemění. Příkladem takového pohybu může být rovnoměrný přímočarý pohyb, při kterém se nemění nejen velikost vektoru rychlosti, ale ani jeho směr. Jiným příkladem je rovnoměrný pohyb po kružnici, při kterém se sice nemění velikost rychlosti, ale mění se její směr.
- nerovnoměrné - Velikost rychlosti se s časem mění. V závislosti na velikosti zrychlení může jít o pohyb zrychlený, zpomalený.
Pro komplexnost tohoto studijního materiálu pouze stručně shrneme základní poznatky týkající se nejčastějších pohybů, se kterými se setkáváme.
Přímočarý pohyb
Rovnoměrný přímočarý pohyb
Rovnoměrný přímočarý pohyb je pohyb, u kterého se nemění velikost ani směr rychlosti. Rychlost je tedy konstantní a trajektorií je přímka.
Dráha, kterou sportovec urazí při rovnoměrném pohybu, roste přímo úměrně s časem. Tuto závislost vyjadřuje vztah
 ,
,
kde s0 je počáteční dráha.
Rovnoměrně zrychlený, resp. zpomalený přímočarý pohyb
Jde o nejjednodušší variantu nerovnoměrného pohybu. Rovnoměrně zrychlený pohyb je charakterizován pohybem po přímce s konstantním zrychlením. Rovnoměrně zrychlený přímočarý pohyb je tedy pohyb, u kterého směr i velikost zrychlení zůstává konstantní, trajektorií je přímka nebo část přímky. Vzhledem k tomu, že u přímočarého pohybu je an = 0, zrychlení a = at. Směr rychlosti se nemění. Velikost rychlosti se mění přímo úměrně s časem, je dána lineárním vztahem
 ,
,
kde v0 je počáteční rychlost. Jestliže je v čase t0 počáteční rychlost v0 =0, pak platí

Grafickým znázorněním závislosti rychlosti na čase je přímka (obr. 9).
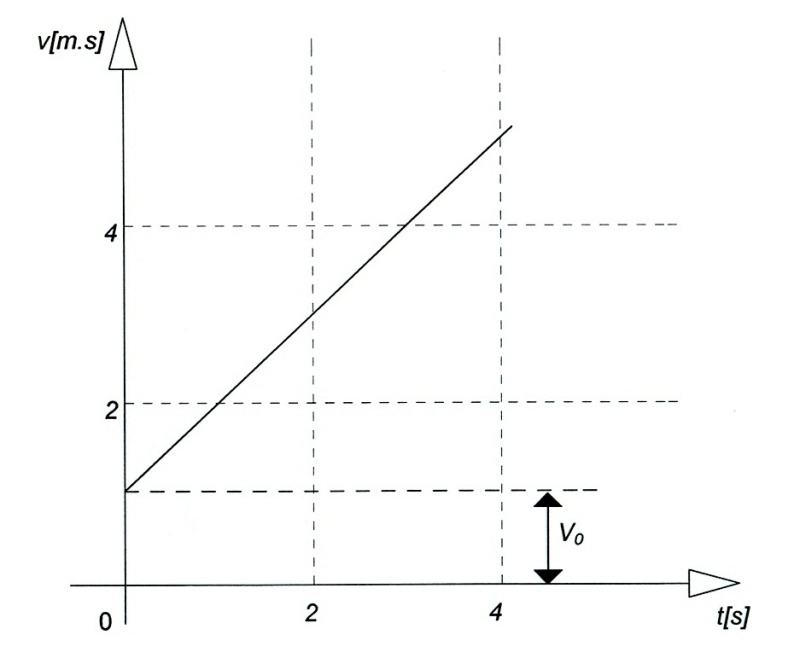
Obr. 9 Graf závislost rychlosti na čase u rovnoměrně zrychleného pohybu
Dráha, kterou těleso urazí rovnoměrně zrychleným pohybem je dána vztahem
 .
.
Dráha rovnoměrně zrychleného pohybu při nulové počáteční rychlosti je tedy přímo úměrná druhé mocnině času.
Má-li zrychlení stejný směr jako rychlost, jde o pohyb rovnoměrně zrychlený, má-li opačný směr, jde o pohyb rovnoměrně zpomalený. Ve vztazích se zpomalený pohyb projeví opačným znaménkem zrychlení a.
Křivočarý pohyb
Křivočarý pohyb je takový pohyb, jehož trajektorií je prostorová křivka. Vektor rychlosti i zrychlení se s časem mění. Velikost rychlosti se měnit nemusí, ale směr rychlosti je v každém okamžiku jiný. Tečné zrychlení nemusí být přítomné (pokud zůstává velikost rychlosti konstantní), ale vždy je přítomné normálové zrychlení související se změnami směru rychlosti. Základním křivočarým pohybem je pohyb po kružnici. Dalšími křivočarými pohyby, kterými se pohybují tělesa v blízkosti povrchu Země, jsou vodorovný vrh a šikmý vrh vzhůru. Z těchto dvou se ve sportu setkáváme především s šikmým vrhem vzhůru, proto se dále zaměříme na něj.
Rovnoměrný pohyb po kružnici
Pohyb po kružnici patří mezi nejjednodušší křivočaré pohyby. Ve sportu se navíc s tímto pohybem velmi často setkáváme. V praxi nastává obvykle pohyb těla nebo jeho částí po kružnici s proměnlivým zrychlením. Velikost rychlosti se tedy mění nerovnoměrně. Pro naše potřeby však pohyb zjednodušíme a omezíme se na rovnoměrný pohyb po kružnici.
Během tohoto pohybu se velikost rychlosti nemění, mění se však směr rychlosti. V každém bodě trajektorie má vektor okamžité rychlosti v směr tečny ke kružnici. Polohu hmotného bodu určuje polohový vektor r, jehož velikost se rovná poloměru kružnice r. Hmotný bod urazí za dobu ∆t po obvodu kružnice dráhu ∆s, přičemž polohový vektor opíše středový úhel ∆φ. Jednotkou úhlu je radián (rad), platí 1 rad = 57˚20´ nebo také π rad = 180˚, tedy 3,14 rad = 180˚.
Při popisu pohybu hmotného bodu po kružnici užíváme rychlost obvodovou a úhlovou.
Obvodová rychlost v se rovná podílu dráhy ∆s, kterou hmotný bod opíše na obvodu kružnice, a času ∆t
 .
.
Úhlová rychlost ω se rovná podílu úhlu ∆φ, který opíše polohový vektor, a času ∆t
 .
.
Jednotkou úhlové rychlosti je radián za sekundu (rad∙s-1).
Vyjádříme-li velikost rychlosti v pomocí úhlové rychlosti ω, dostáváme
 ,
,
kde r je poloměr kružnice.
Protože u rovnoměrného pohybu po kružnici je velikost obvodové rychlosti konstantní, je konstantní i velikost úhlové rychlosti.
Uvažujme situaci, kdy se po dvou soustředných kružnicích různých poloměrů pohybují hmotné body rovnoměrným pohybem. Může jít například o pohyb napjaté dolní končetiny při obloukovém kopu, kdy osa otáčení prochází kyčelním kloubem. Jedním sledovaným bodem je střed kolenního kloubu, který se pohybuje po kružnici s poloměrem odpovídajícím délce stehna. Druhým sledovaným bodem je střed hlezenního kloubu, přičemž poloměr kružnice odpovídá vzdálenosti hlezenního a kyčelního kloubu. Chceme porovnat obvodové a úhlové rychlosti těchto dvou anatomických bodů. Vzhledem k tomu, že se oba body nacházejí na jedné přímce, při kopu oba opíšou za stejnou dobu stejný úhel, jejich úhlové rychlosti se tedy rovnají. Co se týče obvodové rychlosti, vezměme v úvahu skutečnost, že se každý z bodů pohybuje po kružnici s jiným poloměrem. Kotník tak urazí po obvodu kružnice větší dráhu než koleno za stejnou dobu (obr. 10). Obvodová rychlost kotníku je proto větší než obvodová rychlost kolene.
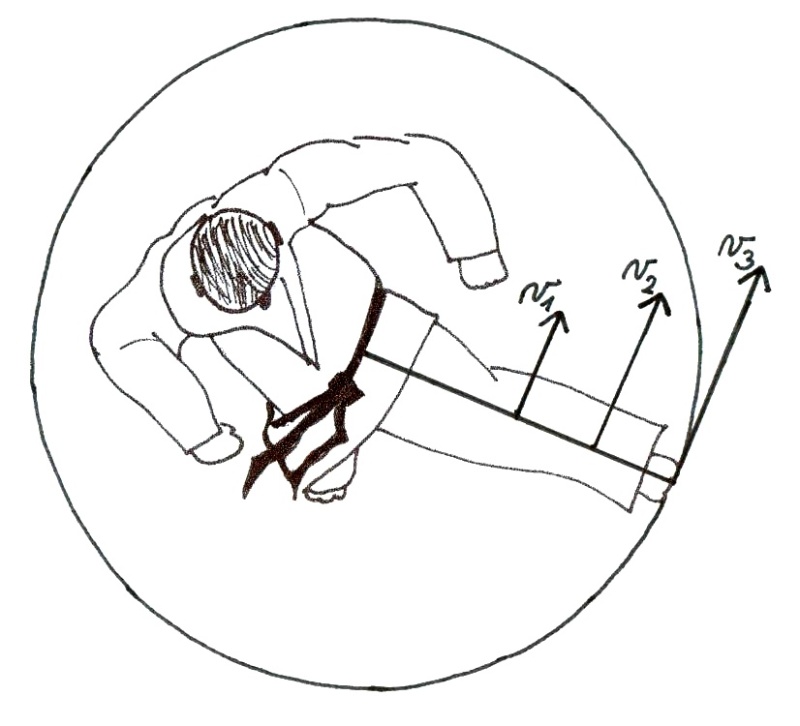
Obr. 10 Obvodová rychlost při obloukovém kopu
Tuto platnost potvrzují i naměřené velikosti obvodové rychlosti jednotlivých anatomických bodů při kopu s otočkou (obr. 11). Nejmenší rychlosti dosahuje kyčelní kloub, vyšší kolenní kloub a největší rychlosti, přibližně stejné byly naměřeny u hlezenního kloubu a paty kopající dolní končetiny. Čím je tedy bod vzdálenější od osy otáčení, tím větší je jeho obvodová rychlost.
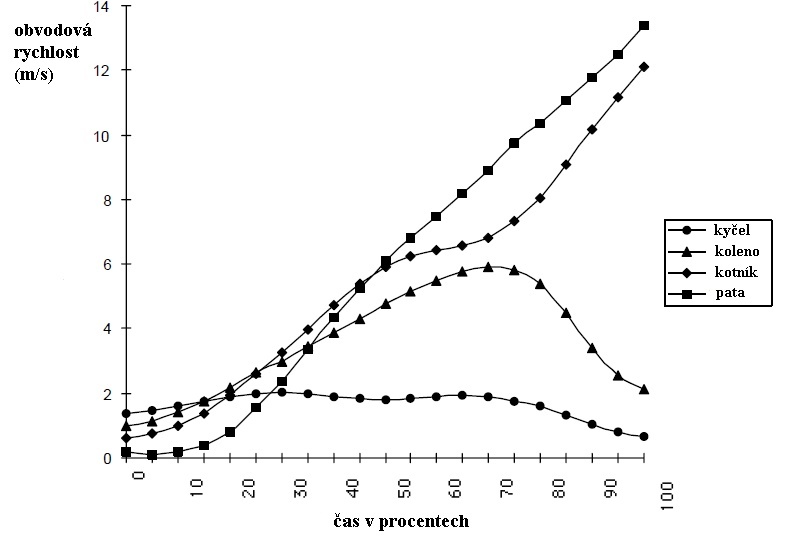
Obr. 11 Graf znázorňuje průběh lineárních rychlostí jednotlivých bodů kopající dolní končetiny u kopu s otočkou (turning kick)
Vzhledem k tomu, že se při pohybu po kružnici mění v každém okamžiku směr rychlosti, je přítomné normálové zrychlení, které nazýváme také dostředivým zrychlením ad. Pro velikost dostředivého zrychlení platí
 nebo
nebo
 .
.
Skládání pohybů
Pohybový projev člověka je charakteristický vysokou variabilitou časoprostorových struktur. Pohybový aparát člověka je schopen vykonávat pohyby od jednoduchých až po velmi složité. Každý z těchto pohybů můžeme vždy kinematicky charakterizovat pomocí trajektorie, rychlosti, zrychlení, atd. Složitější pohyby vznikají složením dvou či více pohybů dohromady. Proto při analýze těchto složitých pohybů, které jsou komplexně těžko řešitelné, přistupujeme k opačnému procesu, tedy rozložení složitého pohybu na více pohybů jednodušších. Výsledný pohyb může vzniknout např. složením více přímočarých pohybů, složením přímočarého pohybu s křivočarým, složením více křivočarých pohybů, současně jednotlivé pohyby mohou být rovnoměrné či nerovnoměrné. Toto nepřeberné množství možných variant vytváří širokou škálu pohybů využitelných pro optimální realizaci daných pohybových úkolů.
Příkladem skládání dvou přímočarých pohybů různého směru jsou např. kopy prováděné ve výskoku, čímž se budeme zabývat dál v rámci šikmého vrhu vzhůru. Složením pohybů přímočarých a pohybem otáčivým vzniká například kop ve výskoku s otočkou charakteristický rotací těla kolem osy procházející těžištěm v bezoporové fázi a další akrobatické prvky bojových umění obsahující letovou fázi.
Princip nezávislosti pohybů
Jestliže tělo koná více pohybů v různých směrech současně, vnímáme výsledný pohyb jako jediný a plynulý. Chceme-li určit jeho polohu v čase t, využíváme principu nezávislosti pohybů, který vyslovil již Galilei:
Koná-li těleso současně dva nebo více pohybů po dobu t, je jeho výsledná poloha taková, jako kdyby konal tyto pohyby postupně v libovolném pořadí, každý po dobu t.
V praxi tedy řešíme zvlášť jednotlivé složky pohybu. Při jejich skládání či rozkládání využíváme počítání s vektory. Nejčastěji výsledný pohyb rozkládáme v kartézské soustavě souřadnic na pohyb ve vodorovném a ve svislém směru, tedy do osy x a osy y. Z principu nezávislosti pohybů vyplývá, že pohyby, které se odehrávají ve dvou vzájemně kolmých směrech, se neovlivňují.
Šikmý vrh vzhůru
S tímto pohybem se setkáváme ve většině pohybových činností, kdy se tělo dostává do bezoporové fáze, nejčastěji odrazem. Z úpolových sportů tomu odpovídají především kopy prováděné ve výskoku a jiné akrobatické prvky bojových umění.
Šikmý vrh vzhůru koná těleso v homogenním gravitačním poli, kterému udělíme počáteční rychlost v0 svírající s horizontální rovinou nenulový elevační úhel. Elevační úhel (neboli úhel vzletu) při šikmém vrhu je úhel mezi vodorovnou rovinou a vektorem počáteční rychlosti v0.
Šikmý vrh vzhůru (obr. 12) vzniká složením rovnoměrného přímočarého pohybu ve vodorovném směru a svislého vrhu vzhůru ve svislém směru. Zvolíme-li souřadnicovou soustavu Oxy, pak jsou souřadnice tělesa v čase t od počátku pohybu následující:
V ose x – rovnoměrný přímočarý pohyb
 .
.
V ose y – svislý vrh vzhůru
 .
.
Abychom zjistili potřebné velikosti počáteční rychlosti zvlášť v ose x a ose y, musíme udělat průmět počáteční rychlostiv0 do těchto dvou kolmých směrů. Horizontální počáteční rychlost v0x a vertikální počáteční rychlost v0y vyjádříme pomocí počáteční rychlosti v0 a elevačního úhlu α:
 ,
,
 .
.
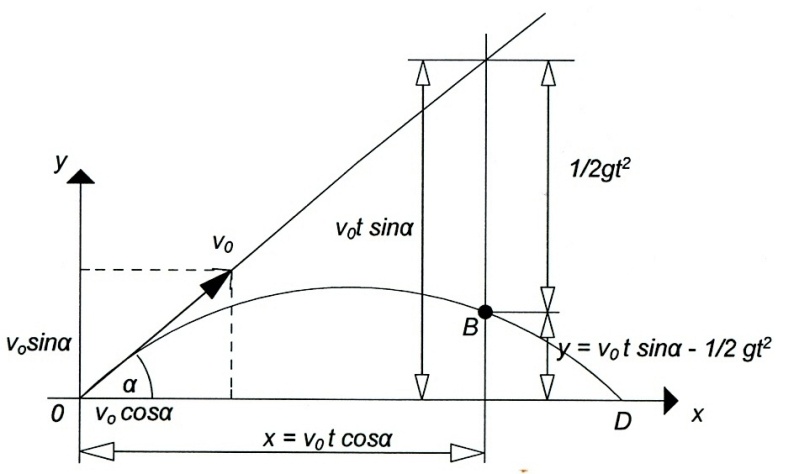
Obr. 12 Šikmý vrh vzhůru (upraveno dle Svoboda a kol., 1996)
V letové fázi se pak vodorovná rychlost nemění, ve směru vertikálním dochází v první půlce vrhu ke snižování počáteční rychlosti v0y až na nulu. V tom okamžiku dosahuje těleso maximální výšky, poté začne vertikální složka rychlosti narůstat až na svou počáteční hodnotu. Při zanedbání odporu vzduchu jsou tedy složky rychlostí vxa vy při dopadu stejně velké jako byly na počátku. V úpolových sportech se těžiště většinou pohybuje jen po části křivky šikmého vrhu vzhůru, a to do okamžiku, než dojde ke kontaktu se soupeřem.
Obrázek 13 ukazuje trajektorii pohybu těžiště těla u skákaného bočního kopu. Vidíme, že jde přibližně o tvar paraboly, která je daná počáteční rychlostí v0 a elevačním úhlem a v průběhu letové fáze se již žádnými pohyby nemění.

Obr. 13 Trajektorie těžiště těla u skákaného bočního kopu (flying side kick)
Počáteční rychlosti ve fázi dokončení odrazu můžeme rozložit následovně (obr. 14):

Obr. 14 Rozklad počáteční rychlosti na horizontální a vertikální složku
Pohybuje-li se tělo šikmým vrhem vzhůru, je trajektorie jeho těžiště, tedy i výška a délka pohybu, zcela určena okamžikem odrazu a za letu ji už není možné žádnými pohyby změnit.
U skoků mluvíme o dvou různých pojmech, o úhlu odrazu a úhlu vzletu. Jaký je mezi nimi rozdíl? Úhel odrazu svírá těžiště a místa opory s vodorovnou rovinou. Úhel vzletu neboli elevační úhel je dán dráhou těžiště v okamžiku dokončení odrazu a vodorovnou rovinou (obr. 15). Tyto úhly většinou nebývají totožné. Pokud se sportovec na skok rozbíhá, je úhel odrazu větší než úhel vzletu, který je dán výslednou počáteční rychlostí (projeví se tedy i složka horizontální rychlosti získaná rozběhem).
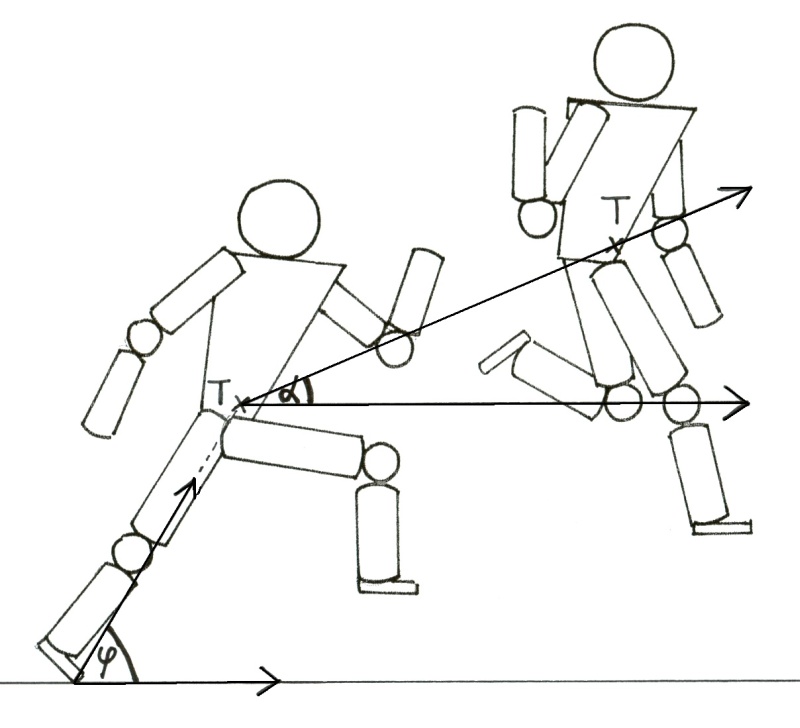
Obr. 15 Úhel odrazu φ a úhel vzletu α
Dynamika
Pohyb a síla
Dynamika se na rozdíl od kinematiky zabývá otázkami, proč a za jakých podmínek se tělesa pohybují. Při hledání příčin změn pohybového stavu těles vždy docházíme k síle. Tato fyzikální veličina charakterizuje vzájemné působení těles neboli interakci, která se projevuje při vzájemném dotyku těles (nárazem, třením, tlakem, tahem) nebo prostřednictvím silového pole (gravitační pole). Síla tedy může být mechanickou příčinou pohybu těles a jejich změn, např. uvedení tělesa z klidu do pohybu nebo naopak, stejně tak ale může být příčinou jejich relativního klidu či deformace.
Podle toho, kde síla vzniká a působí, rozlišujeme v biomechanice síly vnitřní a vnější.
Síla F je fyzikální vektorová veličina, je tedy určena jak velikostí, tak i směrem a polohou svého působiště. Z různých působišť mohou totiž vznikat různé otáčivé účinky sil na těleso. Jednotkou je newton, který se značí N.
Newtonovy pohybové zákony
Základem dynamiky jsou tři Newtonovy pohybové zákony. Popisují vztah mezi pohybem tělesa a silami, které na toto těleso působí.
První pohybový zákon – zákon setrvačnosti
Těleso zůstává v klidu nebo rovnoměrném přímočarém pohybu, není-li nuceno vnějšími silami tento stav změnit.
Formulace „není-li nuceno vnějšími silami tento stav změnit“ neznamená, že na těleso nepůsobí žádná síla. Jestliže se zabýváme pohyby lidského těla, vždy tu budeme mít minimálně tíhovou sílu, která na tělo působí. Nepřítomnost sil není v tomto případě možná. Formulace tedy znamená, že výslednice všech sil působících na těleso je nulová. Podstatné také je, že zákon mluví pouze o vnějších silách. Vnitřní síly izolovaného tělesa tedy nemají na pohyb těžiště žádný vliv.
Příkladem, kdy tělo zůstává podle prvního Newtonova zákona v klidu, může být jakákoli rovnovážná poloha (obr. 16). V této poloze na tělo působí ve vertikální rovině směrem k podložce tíhová síla. Proti ní působí stejně velká reakce podložky. Jejich výslednice je tedy nulová a sportovec tak zůstává v klidu.
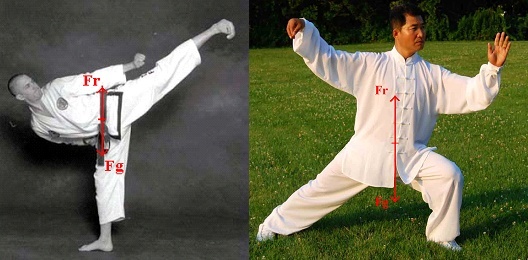
Obr. 16 Tělo ve statických polohách setrvávající v klidu
Tak jak je mnohdy v bojových uměních snahou zachovat klidovou polohu vlastního těla, cílem útoku je narušit klid těla soupeře. Na základě prvního Newtonova zákona ke změně klidového stavu dochází porušením rovnováhy sil. Při úderu tak útočník vytváří sílu, kterou soupeř není schopen kompenzovat stejně velkou silou opačného směru a tím je vyveden z rovnováhy. Například v boxu vidíme, že účinkem úderu se pohne soupeřova hlava, krk, případně celé tělo.
Jinou aplikací prvního Newtonova zákona můžeme prezentovat na příkladu z juda, kdy je naopak od předešlé situace snahou zachovat soupeřovo tělo v rovnoměrném přímočarém pohybu. V reálném pohybu těla se nejedná přesně o rovnoměrný přímočarý pohyb, ale pro zjednodušení s ním budeme počítat. Při hodu o goshi je nutné nejdřív jeho tělo vyvést z rovnováhy. Poté může útočník využít 1. NZ. Soupeř ztratil kontrolu nad svou rovnováhou a přepadává určitým směrem danou rychlostí. Pokud nezačnou působit vnější síly, které by tento jeho pohybový stav změnily, jako např. reakce podložky v případě došlápnutí na podložku, bude soupeř setrvávat v pohybu. Útočník se po přesunutí svého boku pod soupeřovo těžiště snaží udržet tento soupeřův pohybový stav, což mu umožní silově poměrně nenáročné provedení hodu.
Důsledkem prvního pohybového zákona je také skutečnost, že izolované těleso si zachovává svou hybnost.
Jak se těleso bude pohybovat v případě, že výslednice sil na něho působících nebude nulová, vysvětluje dál druhý pohybový zákon.
Druhý pohybový zákon – zákon síly
Působí-li na těleso síly, jejichž výslednice se nerovná nule, pohybový stav tělesa se mění, to znamená, že se mění vektor rychlosti, těleso se pohybuje se zrychlením. Na rozdíl od prvního pohybového zákona se tělesa, na která působí síla, nebudou pohybovat rovnoměrně přímočaře , ale jejich pohyb bude zrychlený, zpomalený, bude měnit směr, případně kombinace těchto možností. Druhý pohybový zákon vyjadřuje vztah mezi výslednicí působících sil F a zrychlením tělesa a:
Velikost zrychlení a tělesa je přímo úměrná velikosti výslednice sil F působících na těleso a nepřímo úměrná hmotnosti m tělesa.
Druhý pohybový zákon matematicky zapisujeme ve tvaru
 , často také
, často také
 .
.
Změna pohybového stavu závisí na směru působící síly. Jestliže síla působí ve směru pohybu, způsobuje zrychlení tělesa, jestliže působí proti směru pohybu, způsobuje zpomalení tělesa. Jestliže síla působí kolmo na směr pohybu, způsobuje změnu směru pohybu.
V bojovém umění je často pro efektivnost útočných úderů důležitá vysoká rychlost pohybů. Působí-li svalová síly F na dané segmenty o hmotnosti m, způsobí jejich zrychlení a se snahou dosáhnout maximální rychlosti. To znamená, čím větší zrychlení, kterého je schopen útočník dosáhnout, tím větší sílu daná technika úderu má. Jinou možností aplikace tohoto zákona je situace, kdy útočník působí silou úderu F na protivníka a tím za jistých okolností uvádí jeho tělo o hmotnosti m do pohybu se zrychlením a. Tento zákon nám také umožňuje zjistit, jak velká síla F vzniká při úderu, jestliže je hmota o hmotnosti m tímto nárazem zpomalena s určitým zpomalením a. Podrobněji se tomuto problému věnujeme v souvislosti s impulsem síly.
Třetí pohybový zákon – zákon o vzájemném působení těles neboli zákon akce a reakce
Síly, kterými na sebe působí dvě tělesa, jsou stejně velké, navzájem opačného směru a současně vznikají a zanikají.
Důležité je uvědomit si, že každá z těchto sil působí na jiné těleso. Proto se akce a reakce navzájem neruší, nemůžeme říct, že by jejich výslednice byla rovna nule, neboť sčítat a odčítat můžeme pouze síly působící na jedno těleso. Nejedná se proto o rovnováhu sil. Příkladem je vzájemné působení karatistů při jejich kontaktu (obr. 17). Útočník působí na soupeře silou F, jako reakce současně vzniká síla opačného směru -F, kterou působí soupeř na útočníka.
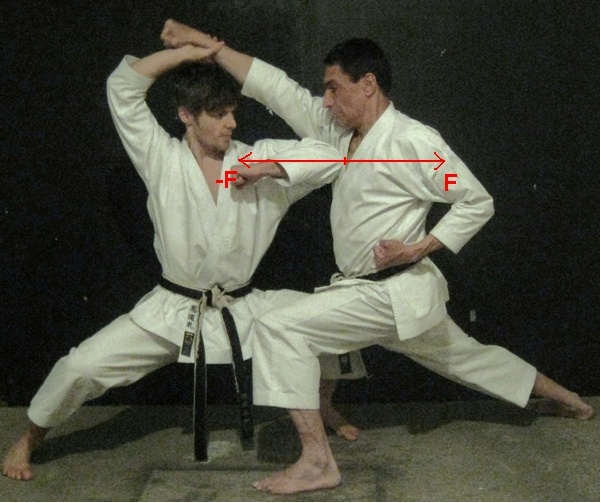
Obr. 17 Síly akce a reakce při úderu v karate
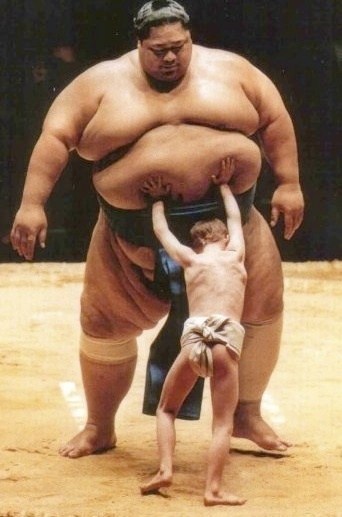
Bylo by tedy chybou myslet si, že útočník musí působit větší silou na soupeře, když ho například přetlačí, či vyvede z rovnováhy (obr. 18).

Obr. 18 Síly akce a reakce při hodu soupeře v judu
Princip vzájemného působení není závislý na pohybovém stavu tělesa (tzn., zda je v klidu nebo pohybu), ale platí vždy. Tím se odlišuje od prvního a druhého pohybového zákona, které platí pouze v inerciálních soustavách.
Pro porozumění uvažujme jednoduchý příklad - dvě loďky, v první loďce sedí tři lidi, v druhé šest lidí (obr. 19). Jak se budou pohybovat loďky, když se od sebe odtlačí? Síly, kterými na sebe loďky působí, jsou stejně velké, avšak jejich účinky mohou být rozdílné. Loďka se třemi lidmi se začne pohybovat s větším zrychlením, než loďka s šesti lidmi. Pohybové účinky síly tedy závisí na hmotnosti tělesa, což vyplývá z druhého pohybového zákona.
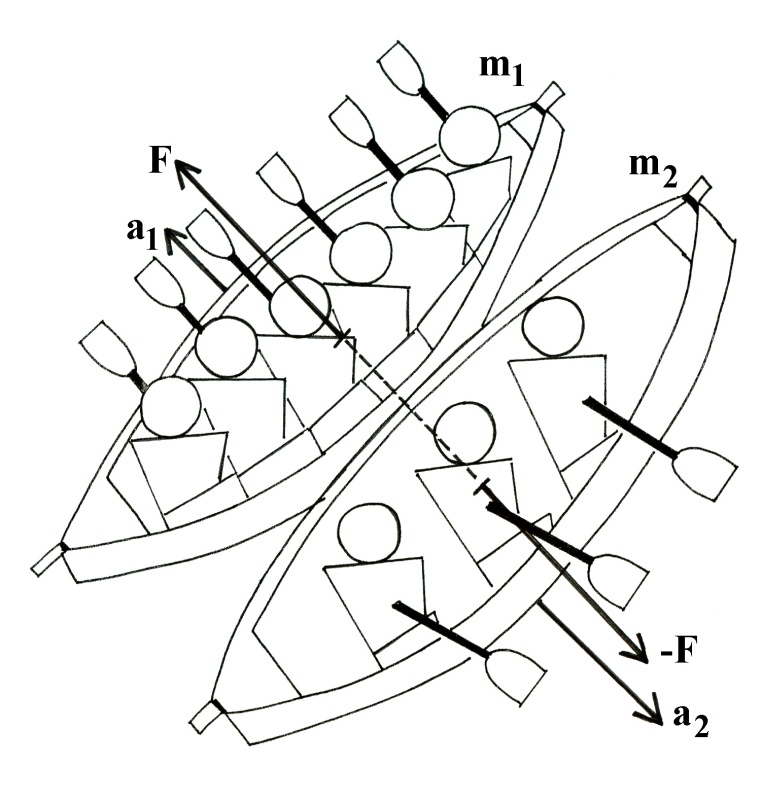
Obr. 19 Síly akce a reakce a jejich účinky
Síly akce a reakce jsou tedy stejně velké, liší se však svými pohybovými účinky. Kolikrát je útočník hmotnější, tolikrát menší bude zrychlení, se kterým se začne pohybovat oproti soupeři. Pohybové účinky obou sil jsou tedy v závislosti na hmotnosti různé (obr. 20).

Obr. 20 Účinky síly
Vedle pohybových účinků může mít síla také deformační účinky, kterých se v úpolech využívá. Síly akce a reakce jsou opět stejně velké, ale vzhledem k místu na těle, na které působí, má tato síla rozdílné účinky na jednoho a druhého soupeře (obr. 21).

Obr. 21 Síly akce a reakce - deformační účinky síly
U zákonu akce a reakce nemůžeme opominout také sílu reakce podložky FR. Ve statické poloze, při chůzi, běhu, skocích vyvíjíme působením na podložku určitou tlakovou sílu F. Jako reakce vzniká stejně velká síla opačného směru, kterou působí podložka na tělo. A je to právě tato reakce podložky, která uvádí člověka do pohybu. Při řešení konkrétních situací obvykle rozkládáme obě síly na horizontální a vertikální složku (obr. 22).
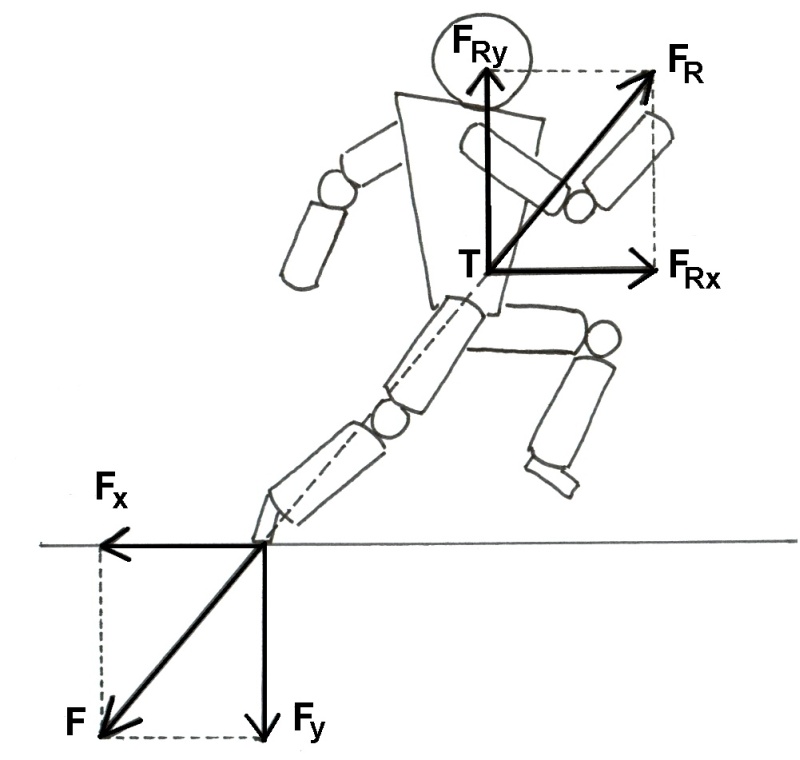
Obr. 22 Zákon akce a reakce při odrazu
Význam reakce podložky je v bojových uměních silně zakořeněn. Východní tradice říká, že bojovník může čerpat svou sílu ze Země. Jindy je zdůrazňován význam uzemnění se. Tato tvrzení jsou podvědomím chápáním skutečnosti, že síla, kterou tlačíme do podložky, se nám ve formě reakce podložky vrací. Tato opora je podmíněna pevnou půdou pod nohama, což je součástí bojových technik a pevných postojů.
Vnější síly
Bez působení sil nemůže dojít ke změnám pohybového stavu tělesa, jak dokládají pohybové zákony. U tělesných cvičení, jakožto většinou záměrných pohybů jsou prvotní příčinou změny pohybového stavu vnitřní svalové síly. Daný pohyb je tak určen především velikostí, směrem a dobou působení těchto sil. Vnitřní síly ovšem nemohou samy od sebe uvést tělo do pohybu. Vždy dochází ke spolupůsobení vnějších sil, bez nichž by svalové síly pohyb těla nezpůsobily. Vezměme v úvahu základní lokomoční pohyb – krok. Bez vnější opory bychom i s maximálním zapojením svalů tento pohyb nevykonali. Svalové síly jsou tedy prvotním činitelem, pohyb je však determinován jejich koordinací s vnějšími silami, kterými na tělo působí prostředí.
Vnější síly působící na tělo člověka jsou vyvolány působením okolních těles. Vnější síly působí současně se silami vnitřními a výsledná časo-prostorová charakteristika daného pohybu závisí na vzájemném poměru vnějších a vnitřních sil.
Podrobněji se budeme věnovat síle tíhové, třecí, dostředivé a odstředivé síle a jejich působení při sportovních činnostech v úpolech.
Tíhová síla
Na všechny hmotné objekty působí na povrchu Země tíhová síla. Touto silou jsou tělesa i tělo člověka přitahováno k Zemi, ať se nachází v klidu či v pohybu. Tíhová síla tak ovlivňuje všechny sportovní výkony. Někdy jí využíváme k dosažení požadovaného výkonu, např. v judu jestliže vyvedeme soupeře z rovnováhy, je to právě tíhová síla, která nám ho následně pomáhá dostat na zem. Jindy ji musíme svalovými silami překonávat, jak je tomu např. u výskoku nebo při zvedání kopající dolní končetiny. Už při vzpřímeném postoji ji musíme překonávat aktivitou posturálních svalů. Z druhého Newtonova zákona vyplývá, že stálá síla uděluje tělesu stálé zrychlení, v tomto případě je to tíhové zrychlení g. Velikost tíhového zrychlení závisí na zeměpisné šířce. Dohodou byla stanovena velikost normálního tíhového zrychlení na hodnotu g = 9,806 65 m·s-2 (po zaokrouhlení). S tímto zrychlením se pohybují tělesa při volném pádu. Pro velikost tíhové síly platí
 .
.
V násobcích tíhového zrychlení g se někdy vyjadřuje zrychlení, zejména když dosahuje větších hodnot. Například při nárazu do hlavy figuríny s využitím technik karate byla naměřena velikost zrychlení 120 g, což odpovídá hodnotám dosažených při automobilové nehodě (Schwartz a kol., 1989).
Další veličinou je tíha G, která není totéž, co tíhová síla. Tíhová síla je síla, kterou působí Země na těleso, přičemž se její působiště nachází v těžišti tělesa. Kdežto tíha je síla, kterou působí těleso na podložku nebo na závěs, projevuje se tedy jako tlaková nebo tahová síla. Její působiště je v místě kontaktu tělesa s podložkou nebo v bodě závěsu. Tíhová síla je jednoznačně určena hmotností tělesa m a tíhovým zrychlením g. Je-li těleso v klidu, je tíha stejně velká, jako tíhová síla. Například stojí-li člověk ve statické poloze, je k Zemi přitahován tíhovou silou FG a současně působí na podložku stejně velkou tlakovou silou G (obr. 23).
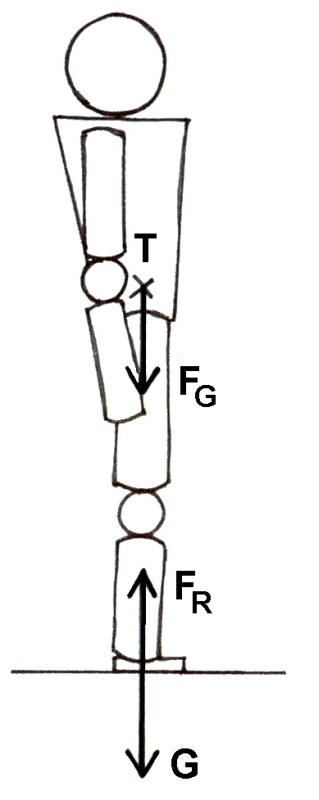
Obr. 23 Vznik tlakové síly G
Velikost tíhy však závisí také na dalších silách působících na těleso – na setrvačných silách, které mohou vzniknout při změnách pohybového stavu tělesa. Tíha tělesa tak může být stejná, ale i menší či větší než je tíhová síla. Například při odrazu v mikrofázi, kdy již dochází ke zvětšování úhlů mezi segmenty dolních končetin a zvedání těžiště, je tlaková síla na podložku větší než v klidu. K tíhové síle musíme přičíst velikost svalové síly, jejímž působením roste tíha. Jiným příkladem je fáze doskoku, kdy kromě tíhové síly působí na podložku i setrvačná síla pohybujícího se těla. Reakce podložky je pak stejně velká jako výslednice všech sil, kterými na ni tělo působí.
Tíhová síla hraje např. v judu velice důležitou roli. Díky této síle je při správné technice možné soupeře snadno hodit na zem. Čím je soupeř těžší, tím větší tíhová síla na něho působí. V judu je podstatou snaha vyvést soupeře z rovnováhy v daném směru podle prováděné techniky. Tíhová síla způsobuje, že po vyvedení z rovnováhy se soupeř zákonitě začne pohybovat směrem dolů. Uveďme příklad. Jeden ze soupeřů udělá delší krok, než by chtěl. Zatímco je jeho noha v pohybu, soupeř mu podrazí nohu ve směru, ve kterém se pohybuje. V tom okamžiku jeho nohy nevytvoří potřebnou plochu opory, těžiště se tedy dostává mimo ni a tíhová síla okamžitě způsobuje pád těla na zem.
V technikách zápasu se také využívá tíhové síly, často však také musí být tíhová síla soupeře překonána při chvatech, kdy je soupeř zvedán do výšky. Tíha zápasníka ve statické pozici na podložce vyvolá stejně velkou sílu opačného směru – reakci podložky. Když se zápasník zapře nohama silně proti podložce, vzrůstá tíha těla a s ní i velikost reakce podložky. Můžeme říct, že reakce podložky je pasivní síla, která se projevuje jako odpověď na tlak vyvolaný tíhou těla zápasníka. V případě, že je zápasník v kontaktu s podložkou více částmi těla, než jen dvěma chodidly, výsledná síla, kterou působí zápasník na podložku, zůstává stejná. Mezi jednotlivými částmi těla a podložkou však působí menší síla, s čímž se snižuje tlak na jednotku plochy.
Reakce podložky má úzkou spojitost s třecí silou, která je úměrná síle, kterou tělo působí kolmo na podložku a koeficientu smykového tření. Co se týče zápasu, koberce se vyrábějí s poměrně nízkým koeficientem smykového tření. To vyžaduje, aby podrážky bot zápasníků byly vyrobeny se vzorkem a zabránily tak podklouznutí. Na tomto nástinu sil působících při zápase vidíme, že mezi jednotlivými silami (tíhová, tlaková, třecí síla, reakce podložky) je úzká spojitost a jejich velikosti se vzájemně ovlivňují.
Třecí síla
Třecí síla vzniká při pohybu jednoho tělesa po druhém. Působí proti směru pohybu tělesa, má tedy brzdivé účinky. Třecí síla vzniká díky nerovnostem stykových ploch těles, které se po sobě posouvají. Drsnost ploch a materiál povrchu těles je charakterizovánsoučinitelem smykového tření f. Tento koeficient nemá jednotku a jeho velikost se zjišťuje experimentálně. Třecí síla Ft při smykovém tření má velikost

Třecí síla je přímo úměrná velikosti normálové síly FN, což je tlaková síla kolmá na podložku. Jak je ze vztahu patrné, velikost třecí síly nezávisí na velikosti stykových ploch. Smykové tření je v některých případech nezbytnou podmínkou pohybu, jindy je to však síla, kterou se snažíme eliminovat. Třecí síla je nezbytná již při chůzi, jakožto základním lokomočním pohybu, bez působení třecí síly by nám nohy podkluzovaly dozadu, neměli bychom pevnou oporu.
Jak jsme již uvedli, třecí síla působí proti směru pohybu. Zde si však musíme uvědomit, že v průběhu pohybu se může směr třecí síly měnit podle toho, v jaké mikrofázi se tělo v daném okamžiku nachází. Uvažujme základní pohybový prvek – běžecký krok při rozběhu (obr. 24). Ke vzniku třecí síly dochází mezi botou a podložkou po dobu jejich kontaktu. Tuto fázi pohybu můžeme rozdělit na dvě mikrofáze: 1. Mikrofáze doskoku – od okamžiku, kdy noha dokračuje na podložku až do okamžiku, kdy se těžiště těla dostává nad střed plochy opory, 2. Mikrofáze odrazu – navazuje na předešlou mikrofázi a končí v okamžiku, kdy noha opouští podložku. V první mikrofázi sportovec dokračuje na mírně přednoženou dolní končetinu. Kdyby v tomto okamžiku nebyla třecí síla dostatečně velká, noha by podklouzla vpřed a člověk by spadl na záda. Třecí síla tedy působí proti směru pohybu tohoto podklouznutí, to znamená vzad. Jakmile však tělo přechází do druhé mikrofáze, stojná noha se dostává za těžiště těla a při malém tření hrozí podklouznutí nohy vzad. Proti tomuto podklouznutí opět působí třecí síla, ovšem tentokrát vpřed. Vidíme tedy, že třecí síla může měnit v průběhu pohybu směr. Chybné by proto bylo uvažovat tak, že sportovec běží vpřed, proto třecí síla musí směřovat proti pohybu, tudíž vzad. Nejde tedy o pohyb těžiště, ale podstatný je pohyb v místě kontaktu dvou stykových ploch.

Obr. 24 Třecí síla ve fázi doskoku a odrazu
Dostředivá a odstředivá síla
Již dříve jsme uvedli, že při pohybu po kružnici, kdy se v každém okamžiku mění směr okamžité rychlosti, vzniká normálové neboli dostředivé zrychlení ad, které směřuje do středu kružnice. Z druhého Newtonova zákona vyplývá, že každé zrychlení je způsobeno nějakou
silou. V případě dostředivého zrychlení mluvíme o dostředivé síle Fd. Stejně jako kteroukoliv jinou sílu můžeme i
tuto vyjádřit jako součin hmotnosti a zrychlení:
 . Již víme, že pro dostředivé zrychlení platí
. Již víme, že pro dostředivé zrychlení platí
 .
.
Po dosazení dostáváme
 .
.
Dostředivá síla směřuje stejně jako dostředivé zrychlení do středu křivosti, v případě pohybu po kružnici do středu kružnice.
Současně s dostředivou silou vzniká jako reakce stejně velká síla opačného směru - síla odstředivá Fod. Odstředivá síla vzniká v otáčející se soustavě, tedy neinerciální, a je to síla setrvačná. Nemá tedy původ ve vzájemném působení těles, ale vzniká důsledkem setrvačnosti hmoty. Hmota má snahu setrvat v původním pohybovém stavu, setrvačná síla tedy působí proti této změně. Proto má setrvačná odstředivá síla opačný směr než dostředivá síla, která ji vyvolává.
Setrvačné síly
Rozlišujeme síly pravé a zdánlivé. Pravé síly vznikají na základě vzájemného působení těles. Zdánlivé neboli setrvačné síly závisí na volbě vztažné soustavy.
Řešíme-li tedy pohyb v neinerciální soustavě, musíme vzít v úvahu setrvačnou sílu, která je stejně velká jako síla způsobující zrychlení, ale má opačný
směr. Konkrétním příkladem může být brzdící judista při pádu, který zpomaluje díky působení síly reakce podložkyFR. Ta směřuje proti jeho pohybu. Proti této brzdné síle působí setrvačná síla Fs.
 , podle 2. Newtonova zákona můžeme napsat
, podle 2. Newtonova zákona můžeme napsat
 . Pak pro setrvačnou sílu platí
. Pak pro setrvačnou sílu platí
 .
.
Této síle, která působí proti změně pohybu, se také říká doplňková nebo D´Alembertova.
Jiným příkladem je chvat v judu, kdy se útočník snaží uvést soupeře do pohybu. Na soupeře působí síla útočníka, díky níž se bude pohybovat zrychleně. Spojíme-li vztažnou soustavu se soupeřem, vzniká v ní setrvačná síla Fspůsobící proti směru zrychlení. Tuto setrvačnou sílu musí útočník překonat a tato síla roste s velikostí útočníkovy síly.
Časový účinek síly – hybnost, impuls síly, 1. impulsová věta
Hybnost je vektorová veličina, která v dynamice určuje pohybový stav tělesa. Hybnost má stejný směr jako vektor okamžité rychlosti tělesa. Velikost hybnosti závisí na hmotnosti tělesa m a na jeho rychlosti v:
 .
.
Jednotkou je kilogram metr za sekundu (kg∙m∙s-1).
Druhý Newtonův zákon (zákon síly) jinými slovy říká, že každá změna hybnosti je způsobena silovým působením jiných těles. Matematickou úpravou dostáváme vztah vyjadřující tuto formulaci:
 .
.
Součin m∙∆v vyjadřuje změnu hybnosti, ke které působením síly F došlo:
 .
.
Po dosazení dostáváme 2. Newtonův zákon ve tvaru
 .
.
Úpravou vztahu získáváme
 .
.
Vidíme, že změna hybnosti bude tím větší, čím déle a čím větší síla na těleso působila.
Součinem této síly a doby dostáváme vektorovou fyzikální veličinu impuls síly I. Impuls síly vyjadřuje časový účinek síly na těleso
 .
.
Jednotkou je newton sekunda (N∙s).
Tyto poznatky shrnuje 1. Impulsová věta:
Časová změna hybnosti tělesa je rovna výsledné vnější síle.
Uveďme příklady, které nám pomohou pochopit důsledky těchto vztahů pro praxi v úpolových sportech. Společným pojítkem úpolových sportů je snaha dosáhnout potřebné, často maximální rychlosti daného segmentu. Na čem tedy závisí velikost dosažené rychlosti? Ze vztahu

je patrné, že pohybový účinek síly závisí na velikosti působící síly a na době jejího působení. Odtud plyne požadavek na dostatečnou dynamickou sílu. Jestliže tělu udělujeme požadovanou rychlost, zvětšujeme jeho hybnost, jedná se o pohyb zrychlený.
Pro rychlost, které segment těla dosáhne, pak po dosazení platí:
 .
.
Odtud vyplývá, že jestli prodloužíme dráhu, po které segment zrychluje, dosáhneme větší rychlosti. Když to shrneme, větší rychlosti můžeme dosáhnout zvětšením působící síly, prodloužením dráhy s použitím stejné síly, čímž dojde i k prodloužení doby, po kterou působíme.
Jiný příklad vysvětlí, jak se projevuje hybnost a impuls síly v boxu? Hybnost můžeme chápat jako schopnost tělesa odolávat změnám zrychlení. Důležité je pochopit, že obránce může vhodným pohybem v okamžiku kontaktu snížit sílu nárazu. Hybnost, kterou má před nárazem útočník a která se během kontaktu předává obránci má určitou velikost, jejíž změně při nárazu odpovídá impuls síly. Obránce může v okamžiku kontaktu pohybem napadených segmentů ve směru pryč od útočníka zvýšit čas, ve kterém předání hybnosti probíhá, čímž se sníží síla nárazu a tím i její ničivé účinky. Platí, že kolikrát se zvětší čas, tolikrát se zmenší síla. Naopak pokud půjde obránce při nárazu vstříc útočníkovi, zkrátí se doba kontaktu a síla nárazu se zvětší. Tabulka 2 ukazuje možné kombinace velikosti síly a času, kterými je možné zastavit hybnost o velikosti 200 N·s-1.
Tab. 2 Kombinace sil a času vytvářející odpovídající impuls síly
|
Síla |
Čas |
Impuls |
|
200 |
1 |
200 |
|
100 |
2 |
200 |
|
50 |
4 |
200 |
|
20 |
10 |
200 |
|
8 |
25 |
200 |
|
4 |
50 |
200 |
|
2 |
100 |
200 |
|
0.2 |
1000 |
200 |
Doplňme tato teoretická odvození o konkrétní hodnoty získané biomechanickými měřeními úderu profesionálního boxera na světové úrovni, Franka Bruna (Atha a kol., 1985). Během 0,1 s urazilo jeho zápěstí dráhu 0,49 m a v okamžiku nárazu dosáhlo rychlosti 8,9 ms-1. Síla nárazu byla 4096 N, přičemž náraz trval 14 ms. Při nárazu do hlavy o hmotnosti 6 kg by jí tato síla udělila zrychlení 683 ms-2, tedy 70 g.
Shrňme, jak lze dosáhnout co nejtvrdšího úderu, jaká je jeho mechanická podstata. Existují dvě možné odpovědi na tuto otázku. První přístup ke srážkám je přes sílu a hybnost, druhý přes energii. Jak již víme, síla je rovna součinu hmotnosti a zrychlení F = ma, hybnost součinu hmotnosti a rychlosti p = mv. Také víme, jaký je vztah mezi těmito dvěma veličinami: ∆p = Ft, to znamená, že působící síla v čase se projeví změnou hybnosti. Tato rovnost platí na základě zákonu zachování hybnosti, který vyplývá z 3. Newtonova zákona. Důsledkem je tedy skutečnost, že při vzájemném silovém působení těles se hybnost jednoho z nich zvýší o tolik, o kolik se tímto silovým působením sníží hybnost druhého tělesa. Pro dosažení určité změny hybnosti ∆p můžeme tedy působit buď velkou silou po krátkou dobu, nebo malou silou po delší čas.
Proč by měl tedy útočník, v našem konkrétním případě karatista, švihnou rukou co možná nejrychleji? Protože při vyšší rychlosti nárazu je při srážce dosaženo i větší hodnoty zpomalení, což se projeví velikostí síly nárazu. Čím kratší bude doba, po kterou je hybnost přenášena, tím větší bude síla působící na cíl. Tato síla udělí cíli odpovídající zrychlení. Pokud je toto zrychlení dostatečně velké, dojde například u přerážení desek k jejich přelomení.
Stejně to platí pro odraz, který se objevuje v některých technikách úpolových sportů, zejména u kopů ve výskoku (flying kicks neboli jumping kicks). Čím kratší bude doba, během které brzdíme v první mikrofázi odrazu rychlost získanou rozběhem, tím působíme na podložku větší tlakovou (nárazovou) silou. Čím je tato síla větší, tím vznikne větší reakce na ni – reakce podložky, které nás v druhé mikrofázi odrazu urychluje.
Obrázek 25 ukazuje, jak je možné systematicky seřadit parametry podílející se na síle nárazu. V tomto konkrétním případě se jedná o kop s otočkou, proto se zde objevují úhlové rychlosti.
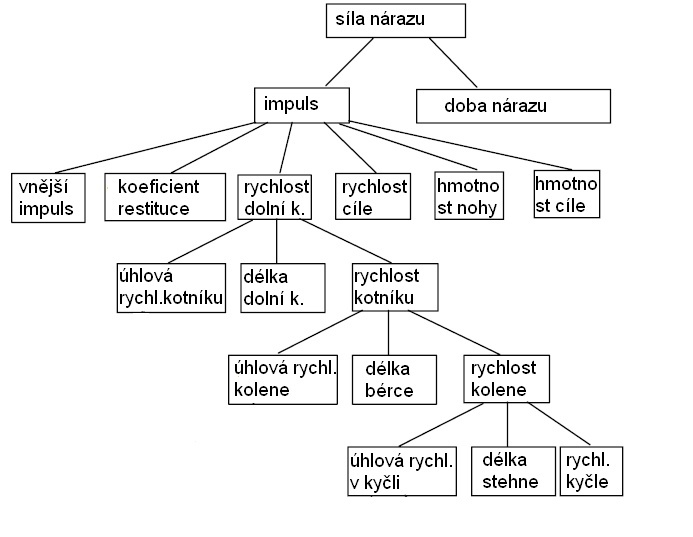
Obr. 25 Závislosti pro sílu nárazu u kopu s otočkou
Různí autoři, kteří sledovali velikosti sil, kterých je dosaženo při kopech, se ve zjištěných hodnotách rozcházejí. Naměřené síly se pohybují od 470, až po 14 000 N. Podle nás se reálné hodnoty u vyspělých sportovců pohybují mezi 4000 a 8000 N. V boxu byla např. naměřena síla 4536 N (sledgehammer) a v taekwondu 6804 N (spinning back kick) nebo 3482 N (roundhouse kick), v karate 4000 N (front forward punch) nebo 4900 N (reverse punch).
Účinnost kopu závisí na více parametrech, které ovlivňují sílu nárazu a její účinky ať již pohybové či deformační. Tyto parametry a jejich vzájemné vztahy si vysvětlíme v následující kapitole.
Co se děje v opačném případě, když pohyb chceme zastavit? Podívejme se podrobněji na problematiku pádů, jejichž technika je na těchto mechanických zákonitostech založena. Pádová technika je jednou z částí úpolové systematiky. Nejvíce byl systém pádových technik propracován v bojových uměních. Zde však pádová technika neznamená pouze fyzický pád soupeře na zem. ,,Ukemi waza (pádová technika) je schopnost přijímat pohyby obránce takovým způsobem, aby nedošlo ke zranění a současně mohla být bojová technika nacvičována bez ztráty pocitu reality, tj. s kinematickými a dynamickými charakteristikami blízkými k bojové, či úpolové realitě.“ (Reguli, 2007)
Pádové techniky můžeme dělit na pády
Ø vpřed
Ø vzad
Ø stranou
Ø kombinované
Dále pád může být proveden
Ø s převratem
Ø bez převratu
Podle způsobu tlumení pádu rozeznáváme pády
Ø se zaražením
Ø bez zaražení
Reguli (2001) upřesnil šest principů pádových technik:
Ø Tlumení pádu největší možnou plochou těla. Použití nejen trupu, ale
i horních a dolních končetin. Vyloučeno použití hlavy. Při pádech s působením malé síly možno pro tlumení (tvorba nové plochy opory) využít i menší
plochu, například dlaň.
Ø Klouzavé tření, případně přímý náraz je nutno převézt na valivé tření (valivý pohyb). Klouzaní těla po podložce způsobuje zranění od malých oděrek kůže až k vážným poškozením tkáně.
Ø Tlumení pádu osvalenými částmi těla. Zamezení kontaktu s podložkou těmi částmi těla, kde se ihned pod pokožkou nachází kost. Kontaktem neosvalených částí těla s podložkou má za následek zranění.
Ø Tlumení pádu v co nejdelším čase (postupná decelerace). Postupný a plynulý přechod části těla do kontaktu s podložkou. Správné provedení vyžaduje dobrou prostorovou orientaci.
Ø Využití kinetické energie pádu na opětovné zaujetí postoje (část energie tedy nemusí padající tlumit). Potenciální energie (postoj) – kinetická energie (pád) – kinetická energie (znovuzaujetí postoje) – potenciální energie (postoj)
Ø Využití přirozeného pohybu. Nutné vytvoření pohybového stereotypu. Spojení pádových technik s pohybovou strukturou přirozených pohybů.
Tyto principy můžeme sledovat na základních pádech, které ukazuje obrázek 26.
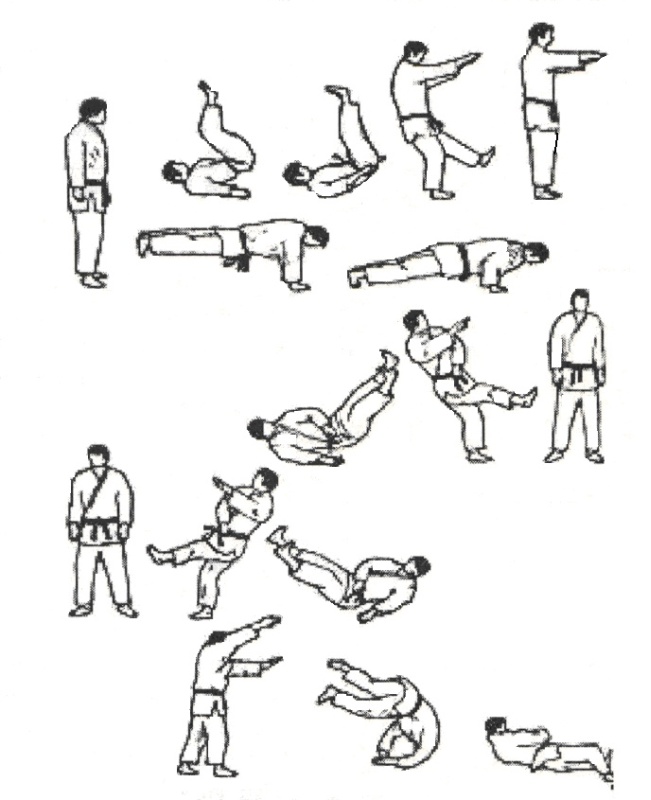
Obr. 26 Pádové techniky v judu (převzato od Sacripanti, 2010)
Pádovou techniku z pohledu biomechanického dělíme na čtyři základní fáze. Tyto fáze jsou:
Ø iniciace
Ø padání
Ø dopad
Ø podopadová poloha
Všechny fáze na sebe během pádové techniky navazují. Dalo by se říci, že každá následující fáze je zapříčiněna fází předchozí.
Iniciace
Iniciací u pádu či pádové techniky rozumíme porušení rovnovážného stavu. U narušení rovnováhy hovoříme o dvou druzích podnětů. Jedná se o podněty vnější a vnitřní nebo jejich případné kombinace.
Padání
Pády rozděluje podle výšky, ze které osoba padá na volný pád, pád z výšky a pád ze stoje. Pádová technika může nejvíce ovlivnit zejména pády z postojů, případě z malých výšek. Při pádech z velkých výšek jsou hodnoty sil natolik velké, že jakákoliv pádová technika, působící jako protiúrazová zábrana, se v těchto případech míjí účinkem.
Dopad
Tato fáze pádu je považována za nejdůležitější. Tato fáze je zahájena prvním kontaktem těla s podložkou po fázi padání a ukončena zastavením pohybu těla
Podopadová poloha
V podopadové poloze rozlišujme v zásadě dvě možnosti ukončení pohybu – v leže či ve stoje.
V judu je důležité osvojit si jak teoreticky tak prakticky koordinovat pády a předcházet tak zraněním. Ukemi techniky jsou založeny na biomechanickém mechanismu, který se projevuje dvěma fázemi.
První fáze rozptýlení - je spojená s přeměnou kinetické energie translačního pohybu na kinetickou energii rotačního pohybu.
Druhá fáze reakce - souvisí s odpružením síly reakce podložky.
Jiné podrobnější dělení rozlišuje čtyři fáze v průběhu letové fáze pádu a dopadu:
První fáze – krční posturální reflexy vyvolávají zvýšení svalového napětí horního biokinetického řetězce.
Druhá fáze – vestibulární reflexy vyvolávají extenzi dolního biokinematického řetězce, čímž způsobují zvýšení momentu setrvačnosti a tím i zpomalení pádu.
Třetí fáze – tělo přizpůsobí lordotické i kyfotické zakřivení těla, aby byla páteř chráněná před zraněním.
Čtvrtá fáze – translační energie je odpružena reakční silou při dopadu na podložku.
K pádům dochází z různé výšky. Také se odehrávají při různých rychlostech. Soupeř může ke gravitační síle přidat svou vlastní svalovou sílu. Hybnost vytvořená při pádu je rovna součinu hmotnosti padajícího judisty a jeho rychlosti. Rychlost judisty a jeho hybnost získaná během pádu se při kontaktu s podložkou snižuje až na nulovou hodnotu. Jde o zpomalený pohyb, kdy působící síla směřuje proti směru pohybu tělesa. Síla, kterou judista udeří do podložky, působí také na tělo sportovce jako síla reakce podložky. Mluvíme zde o nárazových silách. Ze vztahu

vyplývá, že nárazová síla je tím větší, čím je větší hmotnost tělesa, čím je větší změna rychlosti a čím je kratší čas, během kterého k této změně došlo. Konkrétním příkladem může být náraz jedoucího auta do překážky, např. do zdi. Vzhledem k tomu, že zeď při nárazu neuhne, dojde k zastavení auta za velmi krátký časový okamžik. Zároveň platí, že čím větší rychlostí pojedete, tím bude náraz tvrdší a dojde k závažnější deformaci auta a zdi. Jestliže auto pojede stejnou rychlostí jako v předešlém případě, ale narazí například do popelnic, náraz nebude tak tvrdý, protože popelnice se nárazem posunou. Dojde tedy k prodloužení brzdné dráhy a doby brzdění. Působením nárazových sil dochází ve velmi krátkých časových intervalech k deformaci těles a současně se mění rychlosti těles co do směru i velikosti.
Velikost nárazových sil při pádech je tedy závislá na délce doby, po kterou náraz (pohyb) tlumíme. Při nárazu horních a dolních končetin na podložku judista využívá ramena, stehno a kolenní klouby jako části, které absorbují náraz. Provedením této činnosti, judista natahuje časový úsek, během kterého síla působí na podložku a tedy i podložka na sportovce. Zvětšení časového úseku, během kterého síla působí, způsobí pozvolnější změnu hybnosti těla judisty, což vede ke snížení rizika zranění. V některých případech máme dostatečný prostor na zastavení pohybu, avšak někdy jde o náhlé zastavení pohybu téměř na místě. Situace, kdy judista padá vertikálně na podložku, vede k náhlému zastavení pohybu sportovce. V této situaci působí na zem a tedy i na sportovce značná síla v krátkém čase. Pokrčením dolních končetin, podřepnutím a převalem se zvětší čas, po který na sebe působí judista a podložka. Rozšířením plochy kontaktu judistova těla při dopadu na podložku se sníží tlak působící na jednotlivé části judistova těla. Zvětšením plochy kontaktu a prodloužením doby, po kterou síla působí, významně sníží pravděpodobnost úrazu.
Tlak
Síla se víc týká statických poloh, její velikost je tedy více podstatná u technik zápasu, kam patří různé hody, strhy, znehybnění, páky, škrcení. U jiných technik jako jsou údery, kopy, pády je to tlak, který je roven síle rozložené na určité ploše:

Je to právě velikost tlaku, co způsobuje při nárazu zranění. Například při napadení těla nožem je plocha kontaktu velmi malá, odpovídá v podstatě jen ploše hrotu, který se dotýká kůže, proto vzniká obrovský tlak a díky němu nůž proniká do těla. Naopak když například fakír leží na lůžku z hřebíků, je celková plocha kontaktu součtem všech malých plošek jednotlivých hřebíků, tlak tedy není tak velký, aby hřebíky pronikly do těla. Na stejném základu jsou postaveny pádové techniky, kdy se snižuje tlak zvětšením plochy kontaktu.
Každý, kdo zkoušel přerazit desky nesprávnou technikou, může potvrdit, že s nárazem byla spojena i bolest. Bylo by možné mluvit zde o správné technice přerážení desek. Z hlediska fyziky je správná poloha paže důležitá kvůli optimalizaci velikosti plochy úderu. Její minimalizací útočník zmenšuje plochu, přes kterou dochází k přenosu síly a energie. Tím je maximalizována velikost síly a množství energie připadající na jednotku plošného obsahu. Uvažujme úder o reálné energii 190 J. Kdyby byl úder proveden celou dlaní, která má rozměry přibližně 15 x 10 cm, znamená to, že 190 J by bylo přenášeno plochou o velikosti 150 cm2, na 1 cm2 by tak připadlo 1,3 J. Pokud tentýž úder provedeme pouze polštářkem dlaně o rozměrech asi 5 x 3,75 cm, je plocha úderu 18,75 cm2, na 1 cm2 tak připadá 10,1 J, což způsobí mnohonásobně větší deformaci. Z tohoto důvodu je nutné usilovat o minimalizaci plochy úderu, což je patrné nejen u úderových technik paží, ale i u kopů, u používání loktů, kolen a podobně.
Zákon zachování hybnosti, zákon o pohybu těžiště
Jako důsledek 1. Impulsové věty můžeme formulovat zákon zachování hybnosti. Znamená to, že je-li výsledná vnější síla působící na těleso rovna nule, časová změna hybnosti je také nulová. Izolované těleso tedy nemění svou celkovou hybnost působením vnitřních sil.
Tento zákon lze odvodit z 3. Newtonova zákona: Dvě tělesa na sebe vzájemně působí stejně velkými silami opačného směru. Vzhledem k tomu, že tyto síly – akce a reakce současně vznikají a současně zanikají, působí na sebe tělesa také stejnou dobu. To znamená, že také impulsy obou sil jsou stejně velké opačného směru:
 .
.
Na základě vztahu mezi impulsem síly a hybností platí také
 .
.
Odtud dostáváme
 .
.
Na základě tohoto vztahu platí, že při vzájemném působení těles v izolované soustavě zůstává součet hybností roven nule, může se pouze zvětšovat hybnost jednoho tělesa na úkor druhého.
Formulujeme tak zákon zachování hybnosti:
Celková hybnost izolované soustavy těles se vzájemným silovým působením nemění.
Vzhledem k tomu, že je hybnost vektorová veličina, je třeba brát v úvahu její směr. Při správném využití jak vlastní, ale i soupeřovy hybnosti se stává používání bojové techniky efektivnější. Například v judu či aikidu můžeme říct, že nejjednodušší cesta, jak někoho porazit je použít jeho vlastní hybnost proti němu samotnému. Dříve či později útočník napadne soupeře s úmyslem porazit ho. Přitom jde s určitou rychlostí těla proti němu. To je však chyba. Hybnost, se kterou jde útočník do střetu, může obránce využít ve svůj prospěch. Když se podíváme na obrázek 27, můžeme si udělat představu o jednoduchých základech většiny pohybů soft stylu. Červená čára představuje pohyb útočníka a modrá čára představuje pozici postoje obránce. Jestliže útočník udeří do nepohyblivého cíle (obr. 27 a), závisí tvrdost srážky na hybnosti samotného útočníka, tedy na jeho hmotnosti a rychlosti. Když udeří do soupeře, který před ním v okamžiku kontaktu couvne (obr. 27b), zmenší se tím relativní rychlost mezi soupeři a náraz je menší. Nejúčinnější je však úplně se vyhnout přímému nárazu a pouze převést útočníkovu hybnost do jiného směru (obr. 27 c).
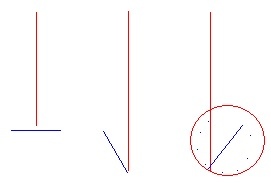
Obr. 27 a, b, c Schémata pohybu útočníka a obránce
Obránce nechá zaútočit útočníka, přičemž udělá mírné kroky vzad, poté uchopí útočníkovu paži nebo ruku pohybující se vpřed a pomáhá útočníkovi pokračovat ve směru jeho okamžitého pohybu. Pak obránce dělá něco zajímavého. Půjde do středu otáčení za útočníka a v úzkém kontaktu s ním ho táhne po obvodu pomyslné kružnice. Tak dvě původně odděleně pohybující se těla vytváří systém jednoho pevného tělesa pohybujícího se po kružnici. Mírné kroky vzad, které předtím obránce udělal, mají ten smysl, že se sám dostane do středu otáčení, zatímco se útočník octne na obvodu kružnice. I když se oba soupeři pohybují se stejnou úhlovou rychlostí, obvodová rychlost s rostoucím poloměrem vzrůstá. Proto čím se těžiště nachází dál od středu otáčení, tím na něho působí větší odstředivá síla, která ho strhává.
Podívejme se na problém pohybu útočníka (m1) a obránce (m2) z hlediska zákonu zachování hybnosti.
p1= m1v1 a p2 = m2 v2
Ze zkušenosti můžeme určit, že průměrný člověk může ujít kolem 6,2 m přibližně za 1,5 s. S využitím toho pro p1 dostáváme
p1 = 90 kg (4.13 m/s) = 372 kg m/s
Nyní předpokládejme, že m1 narazí do m2 přímým nárazem v časovém úseku 0,2 s. Odtud dostáváme sílu interakce
Vyhnutím se přímému útoku malým úkrokem vzad a rotací těla šikmo k útoku s následným otočením útočníka dojde k nepružné srážce. Do hybnosti, která se zachovává, započítáme hybnost jak útočníka, tak i soupeře, který je již před srážkou v pohybu.

Obr. 28 Útočník a obránce při rotaci (převzato od McGonagill, 2004)
Na obrázku 28 můžeme vidět, jak útočník přichází, obránce ukročuje šikmo, a tlačí útočníka do rotace, která způsobí jeho pád. Platí zde tato rovnice:

Počáteční rychlost útočníka je určující pro následnou rychlost rotace. Vedle fyzikálních důvodů je to i z důvodu udržení plynulosti pohybu. Díky tomu je minimalizovaná energie vyžadovaná na obránci.
Když znovu využijeme zákona zachování hybnosti, vidíme, že jestliže obránce zastaví svou hybnost a umožní útočníkovi, aby v pohybu pokračoval sám, útočník tak přijme téměř všechnu hybnost systému dvou spojených těl. Účinkem toho se útočníkovy nohy dostanou ven mimo kružnici a on padá.
Ze zákona zachování hybnosti plynou pro tělesná cvičení ještě další důsledky. V kinematice jsme pro šikmý vrh vzhůru uvedli, že trajektorie, po které se těžiště v letové fázi pohybuje, je zcela určena v okamžiku odrazu, v letové fázi ji již nelze žádnými pohyby ovlivnit. To platí obecně pro jakékoli bezoporové fáze. Tuto skutečnost můžeme vysvětlit právě na základě zákonu zachování hybnosti. Lidské tělo v letové fázi můžeme pokládat za izolovanou soustavu. Vektor celkové hybnosti těla se tedy v letové fázi nemění. Působením svalové síly můžeme v letové fázi pohnout určitým segmentem. Díky platnosti 3. Newtonova zákona vzniká k této akci reakce – je vyvolán pohyb jiné části těla v opačném směru. Těžiště je bodem, ke kterému se tyto pohyby vztahují.
Dráhový účinek síly – mechanická práce
Síla, která působí na těleso po určité dráze a tím těleso uvádí do pohybu, koná mechanickou práci W. Jedná se tedy o vzájemné působení těles, díky kterému dochází k přemístění tělesa po určité trajektorii. Mechanická práce je skalární veličina, jejíž jednotkou je joule (J).
Mechanická práce vyjadřuje dráhový účinek síly. Je-li působící síla rovnoběžná s trajektorií, po které se těleso přemísťuje, je mechanická práce
 .
.
Pokud však síla svírá s trajektorií nenulový úhel, koná práci jen její složka F1 rovnoběžná s trajektorií (obr. 29):
 .
.
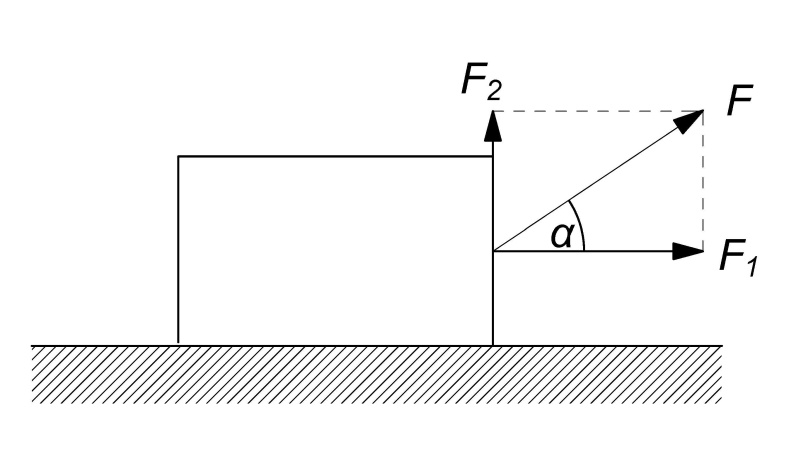
Obr. 29 Mechanická práce (upraveno dle Svoboda a kol., 1996)
Ve statických polohách jsou svaly aktivní (výdrž ve shybu, držení činky nad hlavou, jízda ve sjezdovém postoji apod.), ale z fyzikálního mechanického hlediska nekonají práci. Výdej energie, ke kterému v těchto statických polohách dochází na základě svalové kontrakce, řeší fyziologie.
Pro nás je podstatné, že při konání mechanické práce dochází k předávání mechanické energie mezi soupeři. Útočník, který koná práci, odevzdává mechanickou energii soupeři, na kterém je práce vykonávaná. Soupeř naopak využívá mechanickou práci, aby zastavil hybnost, se kterou na něho útočník, například boxer útočí. Čím je hybnost větší, tím je potřeba více práce, aby zastavila tuto hybnost. Jestliže je potřeba větší práce, je větší pravděpodobnost, že úder způsobí zranění.
Energie
Energie E je skalární fyzikální veličina, která bývá zjednodušeně charakterizována jako schopnost tělesa konat práci. Jednotkou je joule (J).
Mechanická energie charakterizuje mechanický pohyb tělesa a vzájemné silové působení. Mechanickou energii mají
§ tělesa, která se pohybují – kinetická energie,
§ tělesa, na které působí jiné těleso silovým polem, nejčastěji Země tíhovou silou – tíhová potenciální energie
§ tělesa, která jsou pružně deformovaná – potenciální energie pružnosti.
Kinetická energie
Kinetickou (neboli pohybovou) energii mají tělesa, která se vzhledem k dané vztažné soustavě pohybují. Velikost kinetické energie tělesa závisí na hmotnosti tělesa m a na jeho rychlosti v. Je důležité, k čemu pohyb vztahujeme, protože vzhledem k relativnosti pohybu může být vnímaná rychlost v různých vztažných soustavách rozdílná. Velikost kinetické energie však nezávisí na směru rychlosti, pouze na její velikosti. Uvádíme-li těleso do pohybu, musíme vykonat odpovídající mechanickou práci, to znamená, musíme působit na těleso silou F (předpokládejme konstantní) po určité dráze s. Těleso se pohybuje rovnoměrně zrychleně po dráze s, čímž roste jeho rychlost. Urychlením tělesa dochází ke změně jeho kinetické energie. Uvažujme, že do pohybu uvádíme těleso z klidového stavu. Pak můžeme psát rovnici
 .
.
Vykonáním práce W tedy dodáme tělesu kinetickou energii
 .
.
Stejně tak platí opačně: chceme-li zastavit pohybující se těleso s kinetickou energií Ek, musíme vykonat odpovídající práci. Vidíme, že rychlost je velmi důležitá. Když rychlost vzroste dvakrát, energie vzroste čtyřikrát. Když rychlost vzroste třikrát, energie devětkrát. Blum (1977) uvádí, že využitelná energie např. u zadního úderu (reverse punch) nabývá hodnot 171 – 697 J.
Nemůžeme si nevšimnout, že velikost síly, impulsu síly, hybnosti a energie závisí také na hmotnosti tělesa. Jelikož se hmotnost těla v průběhu úderu nemění, bývá považována za konstantu v daných vztazích a tím je opomíjen její význam. Je otázkou kolik hmoty z celkové hmotnosti těla, kterou může útočník disponovat, se podílí na úderu. Proto je zde základní podmínkou nepoužívat paži jen jako prostředek, díky kterému dosáhneme na soupeře. Mělo by být použito celé tělo, důležitý je zejména pohyb boků a tlak zapřených dolních končetin směrem k cíly. To například vysvětluje, proč jsou boxeři jen zřídka sraženi do bezvědomí direktem, kde se na úderu podílí jen o něco málo více hmoty než samotná paže. Často jsou však knockoutováni hákovým úderem, kdy jde boxer do úderu celým tělem.
Tíhová potenciální energie
Tíhovou potenciální (neboli polohovou) energii má těleso, které se nachází v tíhovém poli Země. Země působí na volně padající těleso tíhovou silou FG po dráze h, což je výška, ze které těleso na Zem padá. Tíhová síla tedy vykoná práci
 ,
,
která je rovna tíhové potenciální energii, kterou mělo těleso ve výšce h nad povrchem Země:
 .
.
Jestliže práci koná síla tíhového pole, potenciální energie tělesa se zmenšuje. Naopak, jestliže práci konají vnější síly proti působení tíhového pole, to znamená, zvedají těleso do výšky, potenciální energie tělesa roste.
Například v zápase se setkáváme často s chvaty, při kterých útočník zvedá soupeře do výšky (obr. 30). Útočník koná práci svou svalovou silou a tím
dodává tíhovou potenciální energii soupeři, které následně využije. Soupeř o hmotnosti m zdvižený do výšky h má pak potenciální
energii
 .
.
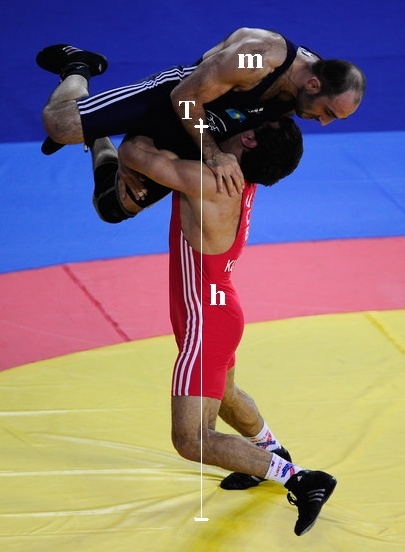
Obr. 30 Zvedání soupeře v zápase – tíhová potenciální energie
V následující fázi, kdy útočník soupeře hodí na zem je využívána práce tíhové síly. Stejně tak se s konáním práce tíhovou silou setkáváme v mnoha chvatech juda.
Potenciální energie pružnosti
Potenciální energii mají pružně deformovaná tělesa, to znamená tělesa, která se vrátí do původního tvaru, přestanou-li vnější síly působit. Na principu pružiny pracují svaly, proto když je protáhneme, zvětšíme tak jejich potenciální energii pružnosti neboli elastickou energii, která následně při pohybu využíváme.
Potenciální energie pružnosti pružiny je dána vztahem
 ,
,
kde k vyjadřuje tuhost pružiny a Δl její prodloužení. Vztahy pro jiná pružně deformovaná tělesa jsou složitější.
Celková mechanická energie
Podrobněji jsme rozebrali kinetickou a potenciální energii, jakožto formy mechanické energie. Určili jsme, kdy má těleso kinetickou energii a kdy potenciální. Pokud má těleso současně kinetickou (těleso se pohybuje určitou rychlostí) i potenciální (těleso je v určité nenulové výšce) energii, jeho celková mechanická energie je pak jejich součtem:
 .
.
Zákon zachování energie
Tento základní zákon konstatuje, že celková mechanická energie izolované soustavy zůstává konstantní. Znamená to, že energie se může pouze přeměnit z jedné formy na jinou formu energie, nemůže však vzniknout, ani zaniknout. Matematicky můžeme tento zákon vyjádřit
 .
.
Zákon zachování mechanické energie je zvláštním případem obecného zákona zachování energie. Ve skutečnosti dochází k větším či menším přeměnám na vnitřní energii. Tyto přeměny jsou způsobeny především odporem prostředí, třecími silami, nepružnými deformacemi. Z praxe víme, že volně puštěný míček se nebude opakovaně odrážet od země do stejné výšky, ale postupně skáče méně a méně až do zastavení. Při dopadu míče na podložku se totiž část kinetické energie, se kterou dopadá, přeměňuje díky nárazu a deformaci na vnitřní energii míčku a podložky. Kolik energie se přeměnilo na vnitřní, o tolik je menší kinetická energie, se kterou míček po odrazu stoupá. O tolik je pak menší i potenciální energie, tedy i výška, do které míček vystoupá.
Podívejme se na několik příkladů zákona zachování energie.
Potenciální energie pružnosti je uložená energie ve svalech. Než boxer udeří svého protivníka, jeho svaly se dostávají při nápřahu do určitého předpětí a jeho tělo a paže má tuto potenciální energii. Jakmile boxer začne úder, potenciální energie pružnosti se začne měnit v kinetickou energii. Velikost kinetické energie závisí na hmotnosti boxera, a rychlosti jeho úderu. Při nárazu do cíle se kinetická energie částečně přeměňuje na kinetickou energii soupeře a částečně na vnitřní energii útočníka i soupeře. Poměr těchto dvou forem energie závisí na druhu srážky, více viz pružné a nepružné srážky.
Gheluve a Schandeviji (1983) studovali práci boků během úderu gyaku tsuki neboli reverse punch (obr. 31).

Obr. 31 Gyaku tsuki
Autoři zjistili, že nejdříve se začínají pohybovat boky, které vyvolávají rotaci trupu, na který navazuje rotace ramen. Energie vytvořená pohybem kyčlí je tak přenesena přes pružnou energii příslušných svalů až do paže a následně pěsti, kde se přenesená energie projevuje ve formě kinetické energie. Při kontaktu by naopak u účinného kopu měla být síla reakce přenesena do těla útočníka v opačném směru, tedy od pěsti přes paži, ramena a trup až ke kyčlím. Graf (obr. 32) potvrzuje následnost pohybů při útoku. Křivky znázorňují rychlosti anatomických bodů kyčle, ramene a zápěstí. Vidíme, že nejdříve roste rychlost kyčle, poté se začíná zvětšovat rychlost ramen a až nakonec narůstá rychlost zápěstí.
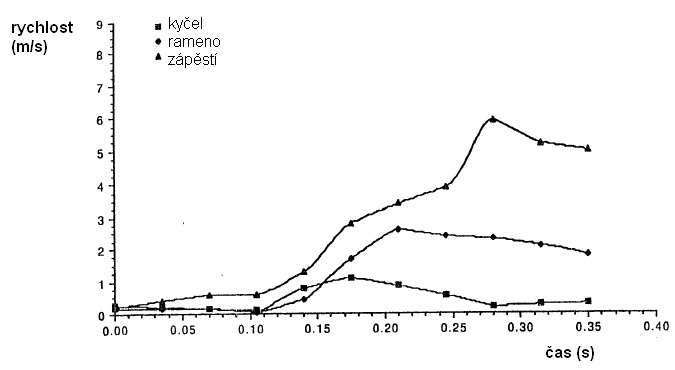
Obr. 32 Průběh rychlostí pohybu jednotlivých segmentů u gyaku tsuki (upravedo dle Gheluve a Schandeviji, 1983)
V rámci této následnosti pohybů můžeme také zmínit Hara gei, což bychom mohli přeložit jako „umění břicha“. Jde především o filosofický a spirituální pojem, který je jedním ze základních u metod zen. Později se však touto problematikou zabývali z vědeckého hlediska K. Harumitsu a K. Hirata. Princip můžeme objasnit na základě biomechanického pohledu na tělo, které je možné členit na dva biokinematické řetězce: 1. pánev – dolní končetiny, 2. trup – horní končetiny. Tyto řetězce jsou propojeny břišní oblastí, činnost břišních svalů je proto důležitá pro jejich správnou koordinaci. Svaly břicha umožňuje přeměnu kinetické energie rotačně-translačního pohybu prvního řetězce (pánev – dolní končetiny) na potenciální energii pružnosti břišních svalů a její následnou přeměnu na kinetickou rotační energii druhého řetězce (trup – horní končetiny). Můžeme to vyjádřit matematicky:
 .
.
Tento přenos energie přes břicho se ukazuje jako nejlepší způsob získání maximální energie druhém řetězce. Čím lépe je tato technika přenosu zvládnutá, tím ekonomičtější je provedení jak z hlediska množství pohybů, tak i z hlediska energetického.
Jinou přeměnu energie můžeme demonstrovat na příkladu pádu vpřed s převratem bez zaražení (obr. 33). Ve stoji má judista určitou polohovou potenciální energii, uvedl-li ho soupeř do pohybu, kvůli kterému musí judista provést pád, má i kinetickou energii. Se snižováním těžiště klesá polohová energie. Přitom roste rychlost pohybu a s ní narůstá kinetická energie. Během převratu se kinetická energie posuvného pohybu přeměňuje na kinetickou energii otáčivého pohybu. Při kontaktu s podložkou v průběhu převratu se část mechanické energie přeměňuje na vnitřní energii jak podložky, tak judisty. Snahou je, aby provedení pádu bylo plynulé a tak tato přeměna na vnitřní energii minimální. V okamžiku, kdy je těžiště nejníže, je potenciální energie minimální. Poté se těžiště začíná zvedat a kinetická energie se přeměňuje zpět na potenciální energii až do okamžiku, kdy je pohyb zastaven ve vzpřímeném postoji.
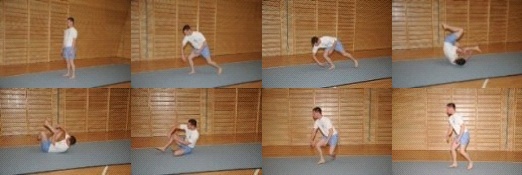
Obr. 33 Kinogram pádu vpřed s převratem bez zaražení (převzato z http://www.fsps.muni.cz/sdetmivpohode/kurzy/pady/vpred.php)
Moment síly
V kinematice jsme již charakterizovali otáčivý pohyb. Nyní se podívejme na tento pohyb z hlediska dynamiky. S otáčivým pohybem se v úpolových sportech a bojových uměních setkáváme v mnoha prvcích. Mnoho technik je na principech tohoto pohybu založeno, zejména v judu, ale i v karate, taekwondu, capoeiře a dalších. Na jednodušších příkladech si ukážeme, na čem závisí vznik otáčivého pohybu a jaké zákonitosti při něm platí.
Těleso je do otáčivého pohybu uvedeno působením síly mimo osu otáčení. Míru otáčivého účinku síly definuje fyzikální vektorová veličina moment síly. Její velikost závisí na velikosti a směru působící síly a na poloze jejího působiště (obr. 34):
 ,
,
kde F je velikost působící síly a r kolmá vzdálenost vektorové přímky síly od osy otáčení. Tato vzdálenost se nazývá rameno síly. Směr vektoru momentu síly se určuje pravidlem pravé ruky: Zahnuté prsty pravé ruky ukazují směr otáčivého účinku síly (směr otáčení tělesa), vztyčený palec ukazuje směr momentu síly. Jednotkou je newtonmetr (N·m).
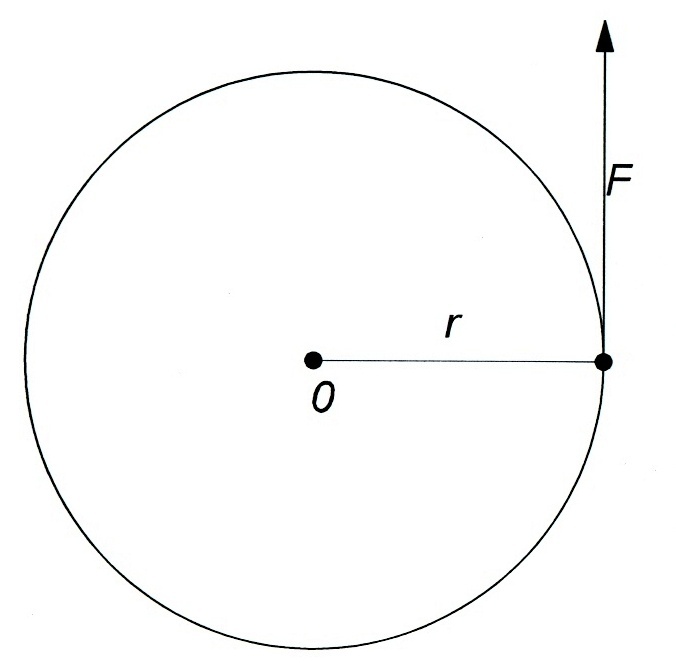
Obr. 34 Vznik momentu síly
Momentová věta
Někdy na těleso působí současně více sil se svými otáčivými účinky. Jejich výsledný otáčivý účinek je určen
 .
.
Výsledný moment sil současně působících na těleso se rovná vektorovému součtu jednotlivých momentů. Za určitých podmínek, kdy momenty působí různými směry, může nastat případ, kdy se otáčivé účinky vyruší. Tehdy platí momentová věta:
Otáčivý účinek sil působících na tuhé těleso se navzájem ruší, je-li vektorový součet momentů všech sil vzhledem k dané ose nulový.
Matematicky lze tuto větu zapsat následovně:
 .
.
Těleso pak zůstává v klidu nebo rovnoměrném otáčivém pohybu.
Dvojice sil
Dvojice sil je zvláštním případem působení rovnoběžných sil opačné orientace a stejné velikosti a nelze ji nahradit jedinou výslednou silou. Dvojice sil má na těleso jen otáčivý účinek, který je vyjádřen momentem dvojice sil.
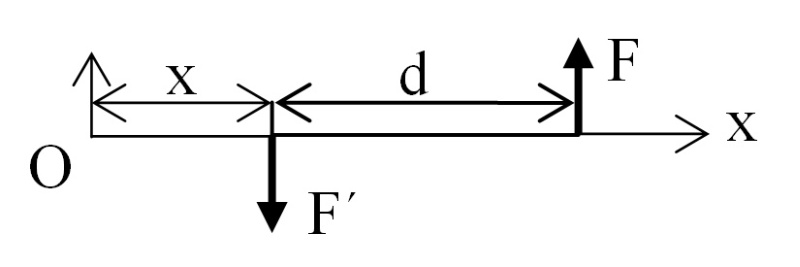
Obr. 35 Dvojice sil
Velikost momentu dvojice sil můžeme odvodit následovně:
Moment dvojice sil je vektorovým součtem momentů sil F a F´, přičemž F = F´ (obr. 35).
D = M + M´
M = F.(x+d)
M´ = - F´. x
D = F.(x+d) - F´. x = F. x + F . d – F . x = F . d
Velikost momentu dvojice sil je rovna součinu velikosti jedné síly a ramene dvojice sil. Moment dvojice sil je kolmý k rovině, v níž leží síly.
Rotační pohyby v úpolových sportech
Jak víme, je to právě moment síly, který způsobuje otáčivý pohyb. V bojových uměních se toho využívá u různých přemetů, přehozů soupeře nebo u pák. Nejjednodušší je uvést tělo do rotace působením dvojice sil, kdy obě síly dávají souhlasný točivý moment dané části těla. Příkladem může být porovnání účinnosti dvojího provedení techniky stržení soupeře v judu. V jednom případě dá tori jednu nohu za nohy ukeho a tlačí do jeho ramen, působí tak silou F mimo osu otáčení, vzniká tedy moment síly. V druhém případě udělá tori v podstatě téměř to stejné, ale současně s tlakem do ramen provede i podtrhnutí nohou. Nepůsobí tedy jednou silou, ale dvojicí sil, což je účinnější. Ze vztahu pro velikost otáčivého účinku vyplývá, že technika bude tím efektivnější, čím jsou působící síly dál od sebe.
Rozeberme podrobněji princip rotačních technik v judu, které tvoří základ tohoto úpolového sportu.
Podívejme se na pět základních faktorů, které mají vliv na provedení rotačních technik v judu.
- plocha opory
U člověka je ve stoji plocha opory tvořena postavením chodidel. Rovnováha se nejlépe udržuje, když postoj není ani příliš úzký ani příliš široký a těžiště se samozřejmě nachází nad vytvořenou plochou opory. Cílem většiny technik juda je chytit soupeře tak, aby nebyl schopen dál udržet rovnováhu, ani zvětšením či změnou plochy opory. Judista na obr. 36 A a D ukazuje nejméně stabilní polohu s malou opěrnou bází, je tak snadno napadnutelný z jakékoli strany. Obrázky 36 B a E ukazují přijatelnější postoj s přiměřeným rozkročením, což umožňuje judistovi zachovat rovnováhu. Obrázky 36 C a F ukazují extrémní postoje, kdy je judista snadno zranitelný ze stran (C) nebo zepředu a ze zadu (F).
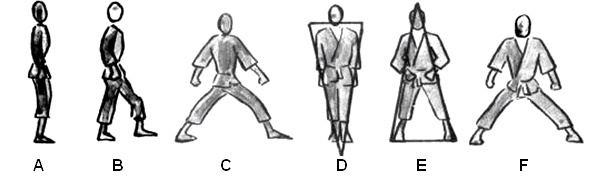
Obr. 36 Postoje judisty s rozdílnými plochami opory (Nishioka, 1969)
- těžiště těla
Poloha těžiště, jakožto bod, kolem kterého je hmotnost těla rovnoměrně rozložena, je v mnoha technikách juda velmi podstatná. Ve většině hodů musí útočník dostat svoje těžiště co nejvíc pod těžiště soupeře. Čím se mu to lépe podaří, tím méně energie musí útočník vynaložit při daném chvatu. Jestliže je soupeř malý nebo podřepne v kolenou, musí se útočník také snížit, aby dostal těžiště soupeře nad svoje těžiště a tak bylo hod vůbec možno provést (obr. 37).

Obr. 37 Poloha těžišť toriho a ukeho při hodu (Nishioka, 1969)
V judu se techniky hodů provádějí mnohem snáz, když je soupeř nejdříve vyveden z rovnováhy, to znamená většina jeho hmotnosti je vychýlena mimo plochu opory a teprve potom začne samotný hod.
- rovnováha
- páka
Páka je hojně využívaná k překonání velkého odporu s využitím malého množství energie.
- Newtonovy zákony
Na kombinaci těchto pěti faktorů jsou založeny techniky juda. Při hodu jde většinou o páku, která začíná ve vertikální poloze, kdy břemeno neboli odpor tvoří dolní část těla, působiště síly je v horní části těla, blízko hlavy. Provedení techniky využívající boky je snazší, když jsou útočníkovy kyčle umístěny pod těžištěm soupeře a síla působí co možná nejvýš nad soupeřovým těžištěm. Jestliže je působiště síly přímo nad těžištěm soupeře, musí útočník vynaložit více síly k provedení hodu (obr. 38).
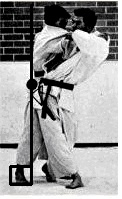
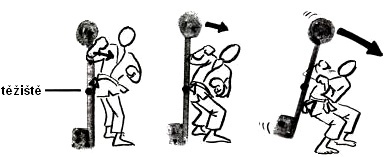
Obr. 38 Vzájemná poloha těžiště toriho a ukeho při hodu (Nishioka, 1969)
Pro provedení hodu s menším vynaložením sil je důležitá první fáze „kuzushi“ – vyvedení soupeře z rovnováhy. Toho útočník dosáhne tlačením či tažením soupeře až do takového vychýlení, že není schopen nadále udržet rovnováhu ani krokem přizpůsobit plochu opory (obr. 39).

Obr. 39 Vychýlení soupeře z rovnováhy (Nishioka, 1969)
A právě to je nejlepší okamžik, kdy by měl útočník zahájit svůj chvat. V této chvíli totiž platí, že nakolik je poloha útočníka správná, natolik může využít gravitace ve svůj prospěch. Také je třeba si uvědomit, že se zvětšujícím se vychýlením soupeře roste otáčivý účinek gravitační síly. Co se týče útočníka, v mnoha případech při přehozu ztratí rovnováhu i on. Útočník obvykle přenese i svou hmotnost ve směru, jakým je proveden hod, ztratí tím rovnováhu, avšak umožní mu to přehodit a zatlačit soupeře k zemi nejen činností paží, ale i hmotností těla (obr. 40).
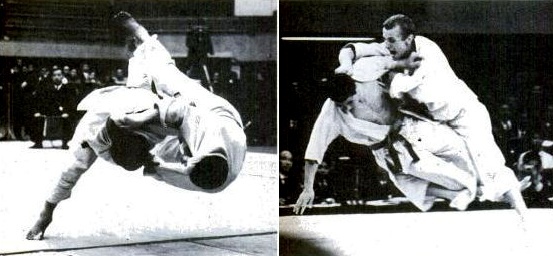
Obr. 40 Dokončení hodu s využitím tíhové síly (Nishioka, 1969)
Rychlost je při použití technik v judu důležitá, avšak nesmí být stavěna před správné provedení chvatu. Začátečníci, ale i pokročilí judisti jdou často do techniky s velkou rychlostí, přesto nejsou schopni soupeře přehodit, jak je vidět na obrázku 41.
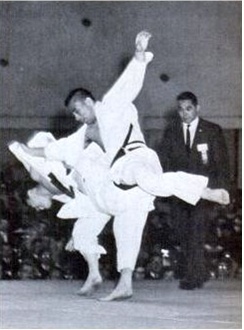
Obr. 41 Nesprávně provedená technika vedoucí k neúspěšnému hodu (Nishioka, 1969)
To ukazuje, že správná technika založená na principu vyvedení soupeře z rovnováhy a následné páky je účinnější než nesprávná technika provedená sebe rychleji. Je tedy potřeba, aby se judista nejdříve naučil správné provedení chvatu a až po té pracoval na rychlosti.
Aplikujme podle Walkera (2002) tyto mechanické principy na tři základní chvaty juda – o goshi, o soto gari a okuri ashi baraj.
O goshi
O goshi je efektivnější a snáze aplikovatelné proti vyššímu a pomalejšímu soupeři. Jednotlivé mikrofáze této techniky ukazuje kinogram (obr. 42).
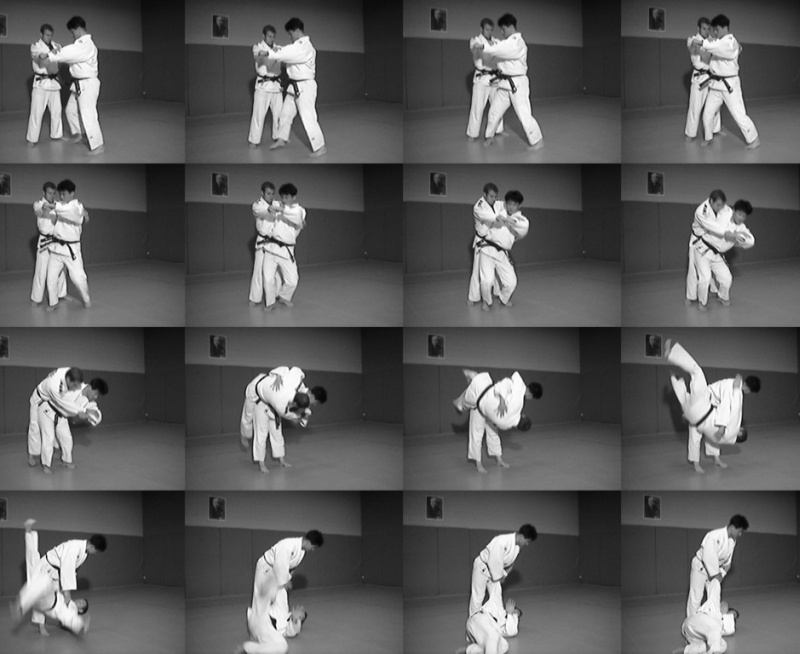
Obr. 42 Kinogram chvatu o goshi
Při tomto chvatu útočník chytí soupeře za kimono v oblasti ramen. Aby mohl provést hod, udělá krok pravou nohou mezi chodidla soupeře se současným táhnutím jeho trupu dolů a doprava (obr. 43). Hod je lépe provedený, když útočník chytí soupeře v okamžiku, kdy vykračuje pravou nohou vpřed. V této chvíli je soupeř méně stabilní, co se týče pohybu vpřed a doprava, kam je útočníkem tažen.
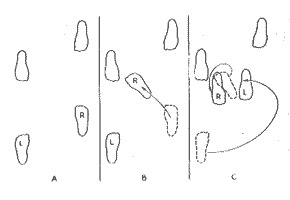
Obr. 43 Práce nohou při chvatu o goshi
Při kroku útočníka vpřed se hlava dostává přibližně do úrovně soupeřových ramen. Následuje rychlá rotace levým bokem vzad se současným tahem soupeře nad pravý bok, kolem kterého se soupeř otáčí (obr. 44).
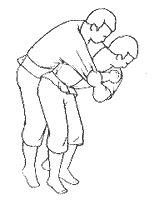
Obr. 44 Fáze chvatu o goshi, kdy se útočník dostává pod soupeře
Ve sportu, kdy nejde o to zranit svého soupeře, drží útočník soupeřovo kimono i po jeho přehození. Ten pak proto dopadá na svůj levý bok a může ztlumit náraz levou paží. Tím rozloží působící sílu při dopadu na větší plochu, takže náraz není tak tvrdý, aby jej zranil. Součástí tréninku v judu je proto i osvojit si správné provedení načasování práce paží při pádech se zaražením.
Správné načasování a provedení jednotlivých mikrofází chvatu je základním předpokladem úspěchu, ale porozumění jeho fyzikální podstatě, zejména principu rotace a pohybu těžiště, je taktéž důležité. Předpokládejme, že při chvatu uvede útočník soupeřovo těžiště do pohybu směrem dopředu. I kdyby na něho útočník už dále nepůsobil, samotné gravitace by způsobila otáčení těla, které by mohlo skončit pádem. Jak již víme, otáčivý účinek síly závisí na velikosti síly a jejím rameni. Rameno síly je v tomto případě kolmá vzdálenost mezi osou otáčení, která prochází prsty nohou, a vektorem tíhové síly. Tíhová síla vychází z centrálního těžiště a její velikost závisí na hmotnosti těla. Když je soupeř ve vzpřímeném postoji, rameno síly je rovno nule. S rostoucím vychýlením roste rameno tíhové síly a s ním se zvětšuje rotace (obr. 45).

Obr. 45 Otáčivý účinek tíhové síly
V případě, že judista táhne soupeře přímo k sobě, bude těžší vyvést ho z rovnováhy, neboť jeho těžiště se pohybuje vpřed ve směru podélné osy jeho chodidla a v tom případě je soupeř schopen udržet ztrácející rovnováhu pokrčením kolene. Judista by tak musel posunout soupeřovo těžiště o dost velkou vzdálenost, aby tím porušil jeho rovnováhu. To vyžaduje sílu a čas, soupeř tak může tomuto chvatu snadno čelit. Jednodušší způsob, kterým lze soupeře vyvést ze stabilního postoje, je táhnou ho doprava, protože v tomto směru stačí posunout těžiště o mnohem menší vzdálenost, aby se vektor tíhové síly dostal mimo plochu opory. Proti takto rychlému vyvedení z rovnováhy soupeř nejspíš nebude schopen nic dělat a tak nebude moci zabránit ani následující rotaci těla.
Táhnutí soupeře má ještě jiný význam. Ohnutím soupeřova těla přes sebe posune judista soupeřovo těžiště těla vpřed do oblasti pupku nebo dokonce mimo soupeřovo tělo. Tato poloha pomůže judistovi uvést soupeřovo tělo do rotace přes svůj pravý bok. Jakmile dojde k tomuto těsnému kontaktu, stává se novou osou otáčení pravá kyčel judisty a síla tahu vytváří nový moment síly způsobující rotaci (obr. 46).
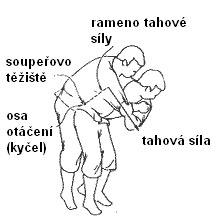
Obr. 46 Síly při hodu přes kyčel
Jak bylo uvedeno výše, rotace můžeme vyjádřit jako součin působící síly a jejího ramene. V tomto případě je to síla tahu F, osa otáčení prochází kyčlí. Je tu však i druhý moment síly v opačném směru, a to moment tíhové síly soupeře. Ramenem tíhové síly je kolmá vzdálenost vektoru této síly od kyčle judisty. Jestliže je soupeř vzpřímený, je rameno jeho tíhové síly nenulové. Vzniká tak moment tíhové síly, který musí judista překonat, aby hod dokončil. To však vyžaduje delší čas a sílu, čímž mizí efekt překvapení rychle provedeného hodu. Špatné provedení ukazuje obrázek 47.
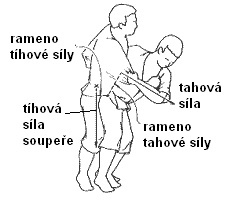
Obr. 47 Špatné provedení hodu
Když je hod proveden správně, judista posunem soupeřova těžiště vpřed k jeho pupku zmenšuje rameno tíhové síly. Vznikají tak podmínky pro snazší přehození soupeře přes bok. Tento chvat se provádí lépe, je-li soupeř vyšší než judista. Za prvé tak judista snáze dostane svůj bok pod soupeřovo těžiště a ohne ho přes sebe. Za druhé rameno páky tahové síly F je u vyššího soupeře delší, což umožňuje vznik většího otáčivého účinku.
Ukažme si u tohoto chvatu, jak můžeme konkretizovat jednotlivé proměnné a matematicky s nimi počítat (převzato od Halliday a kol., 2000):
Judista uchopí svého soka za oděv na rameni a snaží se jej otočit kolem svého těla. Přitom na něj působí silou F. Osou otáčení je spojnice ramenního a kyčelního kloubu judisty. Rameno působící síly vzhledem k této ose má v běžných situacích velikost d1 = 30 cm. Předpokládejme, že judista udělí soupeři úhlové zrychlení 6 rad·s-2 ve směru otáčení hodinových ručiček. Moment setrvačnosti J soupeře vzhledem k ose otáčení je zhruba 15 kg·m2. Porovnejme velikost potřebné síly při správném a špatném provedení tohoto chvatu, má-li soupeř hmotnost 80 kg.
Nejdříve určíme velikost síly F za předpokladu, že judista těsně před provedením chvatu posune soupeřovo těžiště těsně nad svůj kyčelní kloub. Leží-li těžiště soupeře na ose rotace vedené kyčelním kloubem judisty, je moment tíhové síly působící na soupeře vzhledem k ose otáčení nulový (obr. 48).
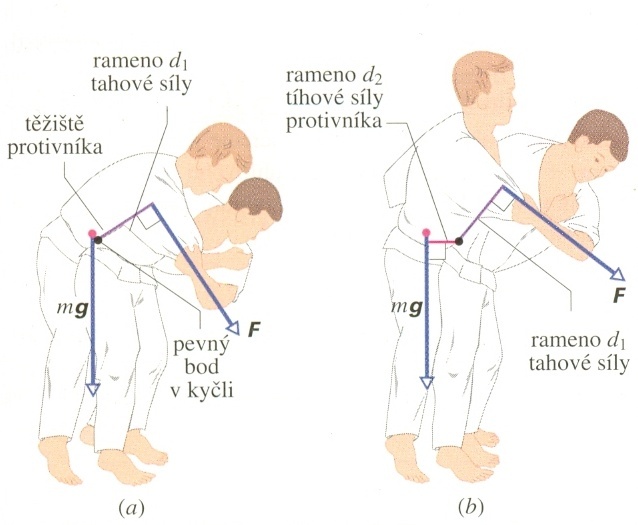
Obr. 48 Správně (a) a nesprávně (b) provedený chvat v judu (převzato od Halliday a kol., 2000)
Jediným nenulovým momentem, který má vliv na pohyb soupeře, je moment síly F.
Můžeme ho vyjádřit
 .
.
Odtud
 .
.
Při špatném provedení zůstane soupeř vzpřímen, takže rameno tíhové síly vzhledem k ose otáčení již není nulové (obr. str. 281). Počítejme, že jeho
velikost d2 = 0,12 m. Jak velká síla musí být za těchto podmínek? Směr momentu tíhové síly je opačný než směr momentu síly F. Výsledný moment síly tedy je
 .
.
Odtud
 .
.
Z výsledků vidíme, jak důležitá je příprava judisty na provedení chvatu. Pokud se mu nepodaří v přípravné fázi posunout soupeřovo těžiště nad svou kyčel, musí při chvatu vynaložit mnohem více síly.
O soto gari
Objasněme rotační pohyb u chvatu o soto gari (obr. 49).
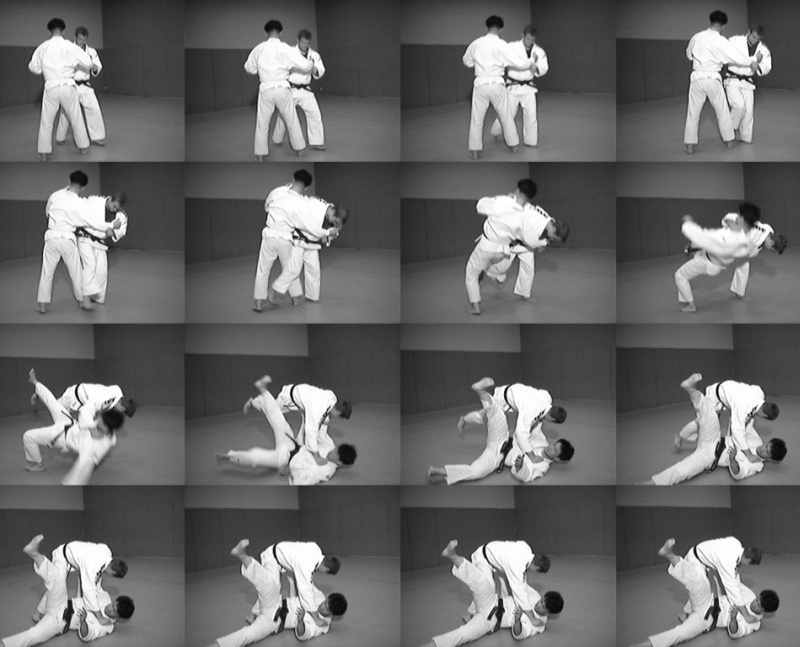
Obr. 49 Kinogram chvatu o soto gari
Když soupeř udělá krok vzad levou nohou, judista přemístí svou pravou nohu za pravou nohu soupeře a tlačí na ni. Současně táhne soupeře do zadu směrem nad jeho pravou nohu, takže se jeho tělo dostává do záklonu. Soupeř se tak nachází v nestabilní poloze, protože je jeho těžiště přesunuto za pravou nohu, vektor tíhové síly prochází podložkou mimo plochu opory. Soupeř nemůže tomuto vyvedení rovnováhy zabránit posunutím pravé nohy a vytvořením nové opěrné báze, jednak protože tomu brání judistova pravá noha, jednak protože je tažen dolů. Chvat je pak dokončen rotací soupeřova těla kolem osy otáčení procházející jeho chodidly, především pravým. Na rotaci se podílí i otáčivý účinek soupeřovy vlastní tíhy (obr. 50).
Obr. 50 Fáze dokončení chvatu o soto gari
Rameno tíhové síly je rovno vzdálenosti mezi osou otáčení a vektorem tíhové síly (obr. 51). V této pozici má judista soupeře dobře nachystaného na dokončení hodu. Tlakem pravé dolní končetiny odstraní část soupeřovy plochy opory a použije tak další rotační moment, aby soupeře rychle shodil na zem. Judista může pokračovat v hodu zvednutím své pravé dolní končetiny se současným tahem paží. Tyto dva momenty ústí v otáčivý pohyb kolem osy otáčení procházející judistovou pravou dolní končetinou. I kdyby však už judista nepokračoval v tahu pažemi po zvednutí pravé dolní končetiny, soupeř by se otočil a spadl na zem díky rotačnímu momentu tíhové síly vycházející z vychýleného těžiště. Tah pažemi však vytváří další moment síly, což rotaci těla urychluje.
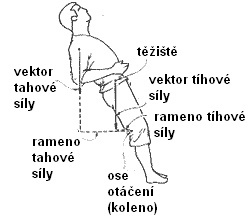
Obr. 51 Síly u hodu o soto gari
Okuri Ashi Barai
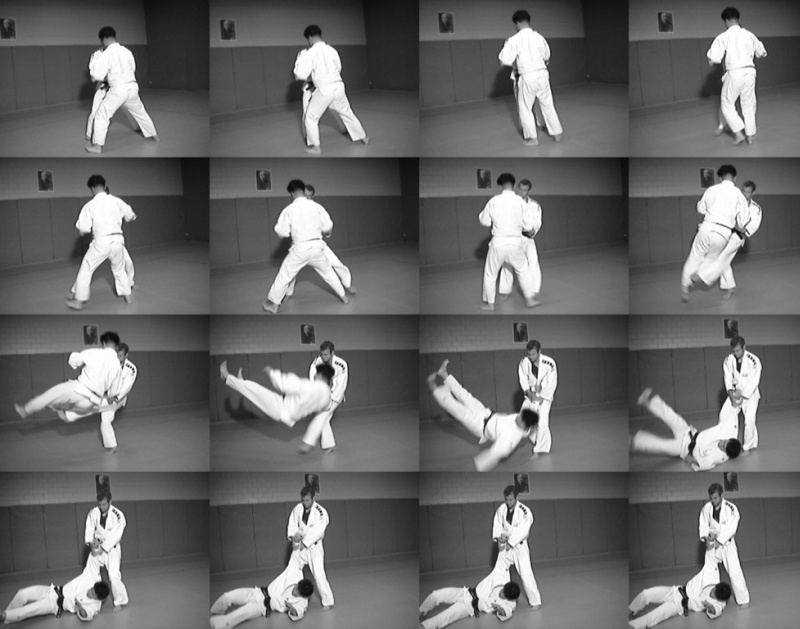
Obr. 52 Kinogram chvatu okuri ashi barai
Při chvatu Okuri Ashi Barai (obr. 52) judista odstraňuje soupeřovu plochu opory obdobným způsobem jako u o soto gari. Když se soupeř při kroku pravou nohou dopředu či dozadu chystá přenést na ni část své hmotnosti, judista mu ji svou levou dolní končetinou podrazí těsně nad kotníkem. Současně táhne horní část jeho těla v původním směru jeho pohybu, soupeř mu tak tedy nemůže klást odpor. Vektor tíhové síly vytváří otáčivý pohyb, který umocňuje moment síly tahu paží. Osa otáčení prochází místem kontaktu soupeřova levého chodidla s podložkou.
V zápase se ke složení protivníka na zem nejčastěji využívá působení dvojice sil, která uvede soupeře do rotačního pohyb kolem osy procházející příčně jeho chodidly. Jak víme, otáčivý účinek závisí na velikosti sil a na jejich kolmé vzdálenosti, tedy na rameni. K otáčivému pohybu dojde v okamžiku, kdy působící momenty sil útočníka jsou větší než momenty svalových sil obránce v opačném směru. Podívejme se konkrétně na chvat, kdy se zápasník snaží působením dvojice sil shodit dozadu. Zápasník pažemi táhne k sobě stehna soupeře a rameny ho energicky tlačí v opačném směru. Sílu F1vytváří svaly paží. Paralelní síla F2 je výslednicí horizontálního tlaku ramen a vertikální tíhové síly, která se na přetočení soupeře podílí od okamžiku, kdy se její těžnice dostane mimo plochu opory. Čím bude kolmá vzdálenost těchto dvou sil větší, tím bude chvat účinnější. Při správném provedení této techniky se soupeř přetočí kolem osy procházející příčně někde na spojnici těchto dvou sil a padá vzad.
V řecko-římském zápase můžeme vidět následující úchop – protivník stojí v čelném postavení poměrně vzpřímený, útočník proti němu tlačí hrudníkem vzad a dolů (obr. 53).
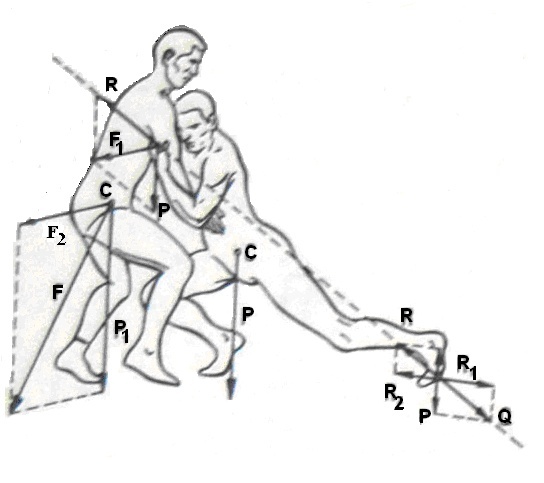
Obr. 53 Síly při úchopu v zápase
Tento tlak hrudníkem je podmíněn pevnou oporou podložky. Čím větší je síla, kterou působí útočník na soupeře, tím větší je i tlaková síla, kterou působí zanožená dolní končetina do podložky. Současně s ní vzniká stejně velká síla reakce podložky R zanožené dolní končetiny útočníka, která je výslednicí horizontální a vertikální složky reakce. Tuto sílu můžeme přes zpevněné tělo útočníka přenést do místa kontaktu se soupeřem a je to právě tato síla, která ho tlačí vzad. Kromě této síly působí na horní část těla soupeře ještě tíhová síla těchto jeho segmentů, dostáváme tak výslednici F1, která působí na rameni r a způsobuje otáčení soupeře kolem osy procházející místem kontaktu jeho chodidel s podložkou. Jakmile se těžiště obránce dostane mimo plochu opory, na otáčivém pohybu směrem vzad se začíná podílet i tíhová síla soupeře vycházející z jeho těžiště.
Techniky založené na pákovém principu
Momentu sil se také využívá u technik znehybnění, jejichž princip je založen na pákovém mechanismu. Pákou rozumíme silové působení na kloub partnera za běžný rozsah, kterým mu způsobujeme bolest. Pákou můžeme silně poškodit zmíněný kloub a tím útočníka přímo vyřadit z boje. Pákou můžeme ale partnera jen dovést či hodit na zem a tam ho znehybnit a kontrolovat. Pokročilejší cvičenci používají páky ke kontrole partnera i ve stoje - útočník, který při nasazené páce pokračuje v útoku, si zpravidla páku "sám utahuje". Zápasník se musí snažit zvětšit páky neboli ramena sil, na kterých působí svými silami a současně zmenšit páky na kterých působí soupeř, aby zmenšil otáčivé účinky jeho silového působení.
Existují dva základní druhy pákového mechanismu: Jednozvratná a dvojzvratná páka. Podle vzájemné polohy působící síly (svalové), břemene (tíhová síla) a osy otáčení také rozeznáváme páky prvního, druhého a třetího stupně.
Páka prvního stupně (dvojzvratná) má osu otáčení mezi vektorem svalové síly a vektorem tíhové síly. Bývá nazývaná pákou rovnováhy. Příkladem je chvat na obrázku 54.
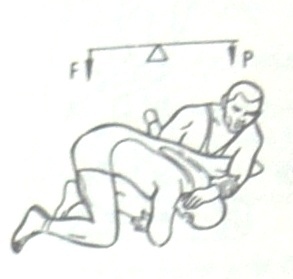
Obr. 54 Páka prvního stupně
Páka druhého stupně (jednozvratná) má vektor břemena mezi opěrným bodem a vektorem působící svalové sily. Rameno síly je delší než rameno břemena. Můžeme konstatovat, že ve statické poloze je svalová síla tolikrát menší než tíhová síla, kolikrát je rameno svalové síly větší než rameno síly tíhové. Bývá nazývaná pákou úspory. Tato páka je součástí mnoha chvatů, příkladem je obrázek 55.
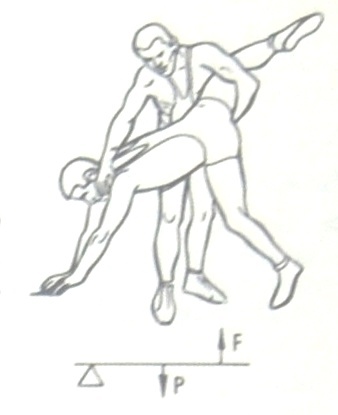
Obr. 55 Páka druhého stupně
Páka třetího stupně (jednozvratná) má rameno síly kratší než rameno břemena. Síla na této páce působí mezi opěrným bodem a břemenem. Vzhledem k poměru ramen sil je podmínkou statické polohy větší svalová síla než tíhová síla břemene. Bývá nazývaná pákou síly a rychlosti. Příkladem je chvat na obrázku 56.
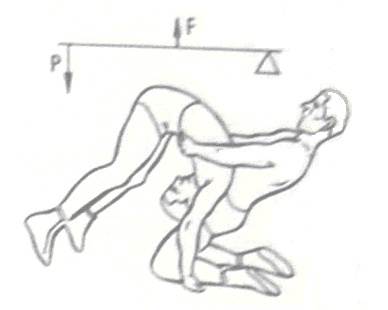
Obr. 56 Páka třetího stupně
Techniky znehybnění – juji gatame
Většina technik znehybnění znamená s využitím své hmotnosti držet soupeře na podložce tak, aby se nemohl převrátit ani zvednout, i kdyby byl silnější než útočník. Tyto techniky můžeme rozdělit na techniky držení, škrcení a páčení. Jednou z nejsilnějších pák paže v judu je chvat juji gatame (obrázek 57), kdy je část hmotnosti judisty rozmístěna na horní části soupeřova těla. Nejen že tento chvat zabrání soupeři vstát, ale ze strachu před zlomením paže mu ani nedovolí pohnout se. Při chvatu leží soupeř na zádech a útočník drží oběma rukama jeho paži, která prochází loktem dolů mezi útočníkovými dolními končetinami. Těmi znehybňuje i horní část soupeřova těla, zejména rameno. Při chvatu juji gatame dochází k páčení natažené paže přes útočníkovo břicho, kdy i jemný tlak na soupeřovo zápěstí způsobuje velký otáčivý moment. Osou otáčení je páčený loket. Soupeř se nemůže posadit, protože hmotnost útočníkova těla vytváří obrovský otáčivý moment na jeho trup. Ani snahy odporovat této páce činností svalů ramenního kloubu nejsou účinné. V této pozici mají velmi malé rameno síly, takže nejsou schopny nasazenou páku překonat, i kdyby byl soupeř velmi dobře silově vybaven. Výsledný moment síly M způsobující otáčení v loketním kloubu je tedy součtem momentu síly paží Fp působících na předloktí a momentu síly dolních končetin Fdk působících na paži v blízkosti ramene (obr. 58). Matematicky to vyjádříme:
 .
.
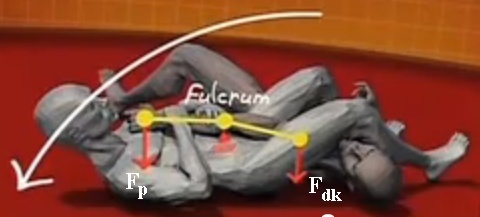
Obr . 58 Technika znehybnění - juji gatame
(převzato z http://www.youtube.com/watch?v=oRWaVjrAjn)
Rovnováha
Statická rovnováha
Udržování a obnovování statické i dynamické rovnováhy sebe samého a vyvedení z rovnováhy soupeře patří mezi základní schopnosti nezbytné pro úspěšnost jakékoliv bojové techniky. Rovnováhu můžeme rozdělit na statickou, kdy jde o udržení rovnováhy v klidu a na rovnováhu dynamickou, tedy v průběhu pohybu. Můžeme říct, že u lidského těla absolutní statická rovnováha neexistuje, každá poloha či pohyb je neustálým procesem obnovování rovnováhy prostřednictvím korekčních pohybů. Už jen procesy probíhající uvnitř těla, např. dýchání, činnost krevního oběhu, mírně vychylují tělo z dané polohy. S jistým zjednodušením však budeme považovat klidové polohy za statické.
Těleso se nachází ve statické rovnováze, jestliže se pohybové účinky působících sil ruší a těleso setrvává v klidu. Z biomechanického hlediska je tělo v rovnovážné poloze, splňuje-li dvě následující podmínky:
Výslednice všech sil, které na těleso působí, je nulová:
 .
.
Výsledný moment sil (vzhledem k libovolné ose) působících na těleso je nulový:
 .
.
Jestliže tedy na těleso působí v jednom bodě dvě stejně velké síly opačného směru, nastane rovnováha. Pro pohyb tělesa, u něhož jsou síly v rovnováze, platí první pohybový zákon. Těleso, u kterého jsou síly v rovnováze (= není nuceno vnějšími silami…) a které se nepohybuje (setrvává v klidu), musí zaujímat některou z rovnovážných poloh.
Aby byl člověk v rovnovážné poloze, musí vektor výslednice působících sil procházet plochou opory. Z toho pro praxi vyplývá následující. Jestliže člověk pohne jednou částí těla určitým směrem, má obecně několik možností, jak tento přenos určité části hmotnosti vyrovnat, aby zůstal v rovnovážné poloze. Je důležité si uvědomit, že udržování těla ve statické poloze je neustálým procesem obnovování rovnováhy prostřednictvím korekčních pohybů. Proto tyto pohyby nechápeme jako rušivé. Snahou však je, aby tyto korekční pohyby měly minimální rozsah. Jejich prostřednictvím můžeme eliminovat rozsah a přenos skutečně rušivých pohybů na další segmenty těla, především pak na těžiště.
Na pohybový aparát se můžeme dívat jako na soustavu inverzních kyvadel s více či méně stupni volnosti v závislosti na fixaci jednotlivých kloubů prostřednictvím izometrické kontrakce. Míková (2006) shrnuje a zpřehledňuje možné balanční strategie ve vzpřímeném postoji. Ať už se jedná o výchylky ve frontální či sagitální rovině, je možná strategie kotníku, strategie kyčle a strategie kroku (obr. 59). Při této třetí strategii je za účelem zachování polohy těžiště nad opěrnou bází využíván pohyb jedné dolní končetiny v opačném směru, než se díky perturbacím vychýlil trup. Tímto pohybem je část hmotnosti těla přenesena na opačnou stranu než hmotnost trupu a těžiště, které se nachází v hmotném středu těla, zůstává nad plochou opory.
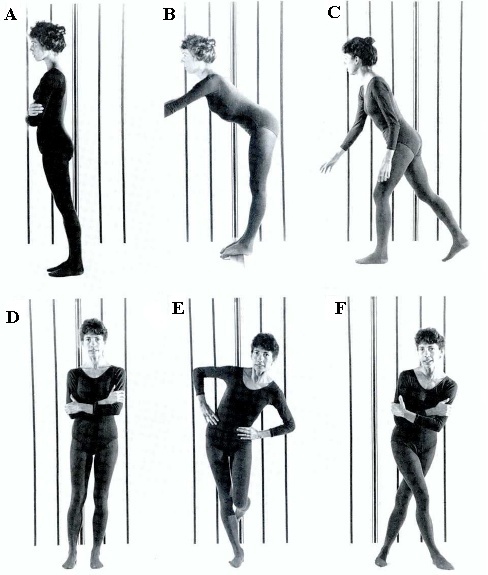
Obr. 59 Balanční strategie: a) d) kotníku, b) e) kyčle c) f) kroku (Míková, 2006)
V bojových uměních je nejvýhodnější využít třetí uvedenou strategii, kdy je pohyb jedné části těla vyrovnán pohybem jiných segmentů otevřeného kinematického řetězce opačným směrem. Příkladem toho může být úklon trupu u bočního kopu, čímž je vyrovnán pohyb kopající dolní končetiny (obr. 60).
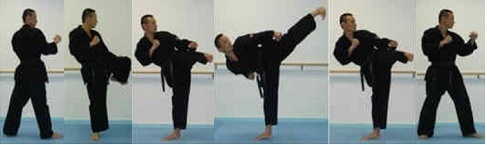
Obr. 60 Kinogram bočního kopu
Aby byla zachována rovnováha v konečné fázi kopu a nedocházelo k přepadávání těla na žádnou stranu, musí platit
 , což můžeme rozepsat
, což můžeme rozepsat
 (obr. 61). Tato úvaha je samozřejmě zjednodušená, protože nebereme v úvahu síly působící od soupeře.
(obr. 61). Tato úvaha je samozřejmě zjednodušená, protože nebereme v úvahu síly působící od soupeře.
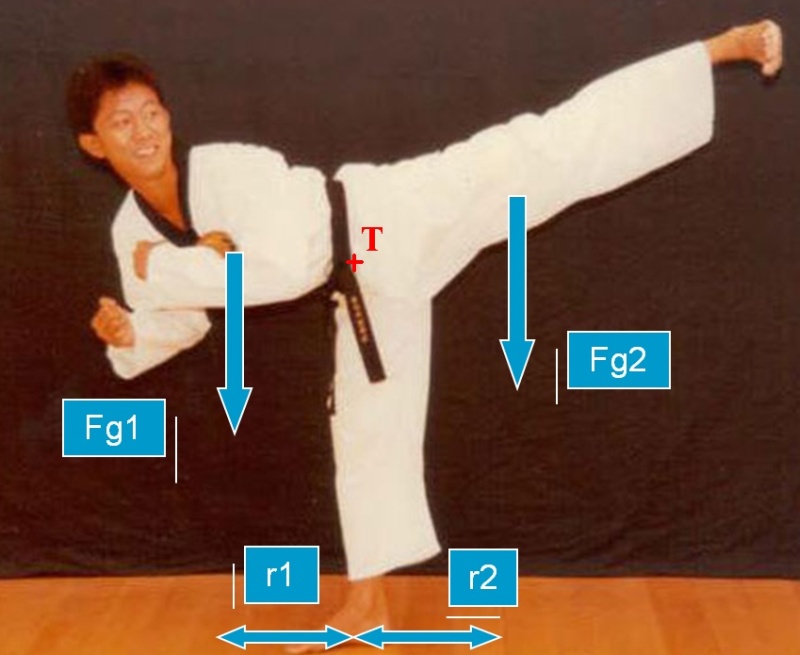
Obr. 61 Momenty sil u bočního kopu
Stabilita
S rovnováhou úzce souvisí stabilita. Tímto pojmem rozumíme množství mechanické práce, kterou je třeba vykonat, abychom podepřené těleso přemístili ze stálé rovnovážné polohy do vratké. Tato práce se rovná rozdílu potenciální energie tělesa mezi vratkou a stálou rovnovážnou polohou.
Stabilita tělesa roste s rostoucí hmotností, s nižší polohou těžiště a s větší vzdáleností svislé těžnice od překlápěcí hrany, roste tedy s rostoucí opěrnou bází. Opěrnou bází rozumíme plochu uvnitř křivky, která „obaluje“ opěrné plochy. Polohy, ve kterých nejčastěji udržujeme rovnováhu je stoj na obou nohách, stoj na jedné noze, případně stoj na rukou. Pro zvýšení stability zvětšujeme opěrnou bázi rozkročením se. V úpolových sportech je pro výkon velmi podstatné nenechat se vyvést z rovnováhy. Čím zaujme soupeř stabilnější postoj (obr. 62), tím musíme vynaložit větší práci, tedy působit větší silou po delší dráze, abychom jeho rovnováhu narušili.
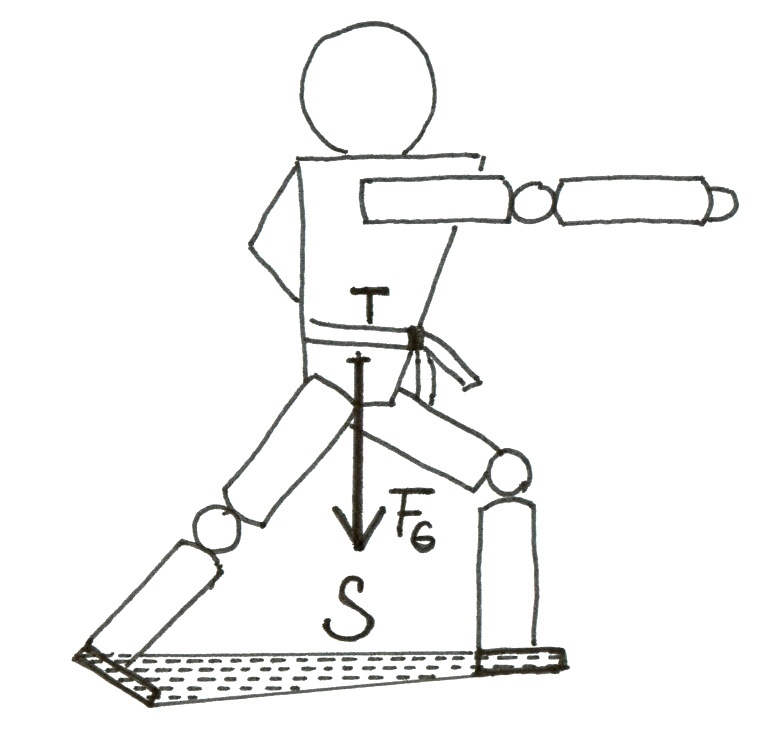
Obr. 62 Opěrná báze u přípravného bojového postoje
V zápase je obtížné zachovat si stabilní postoj, navíc když se přitom oba zápasníci snaží vyvést toho druhého z rovnováhy. Z toho důvodu se každý snaží zaujmout co největší plochu opory – ve stoji rozšířením postoje s paralelními chodidly (obr. 63), na zemi opřením se o ruce a nohy co možná nejvíce do stran (obr. 64). Stabilita postoje závisí na výšce těžiště těla a na projekci těžiště do opěrné báze. Ve stabilním postoji se tato těžnice nachází v blízkosti středu opěrné báze.
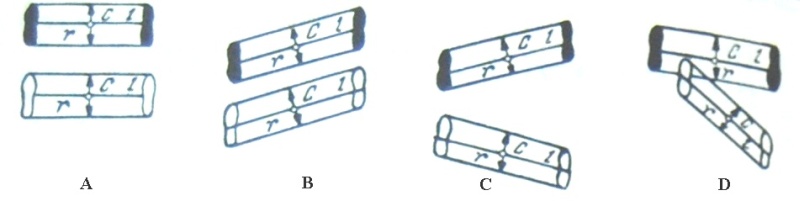
Obr. 63 Plocha opory při rozšíření postoje s paralelními chodidly
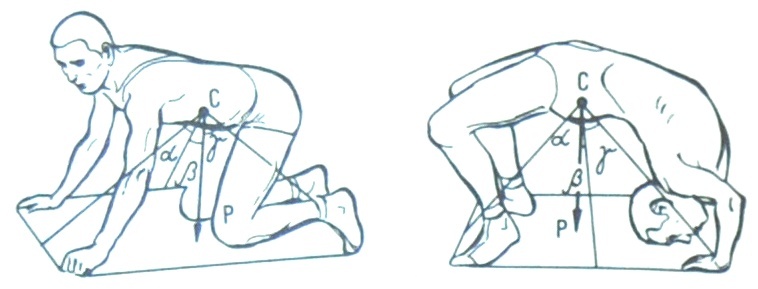
Obr. 64 Polohy s velkou plochou opory a vyznačenými úhly stability
Díky pohybům se pak těžnice přibližuje či oddaluje od středu opěrné báze. Výchylky tohoto vektoru vedou ke změnám úhlu stability, čímž nazýváme úhel mezi vektorem těžnice a přímkami směřujícími do krajů opěrné báze (obr. 65).

Obr. 65 Úhly stability postoje
Obrázek 66 ukazuje změny úhlu stability pro různé polohy těžiště.
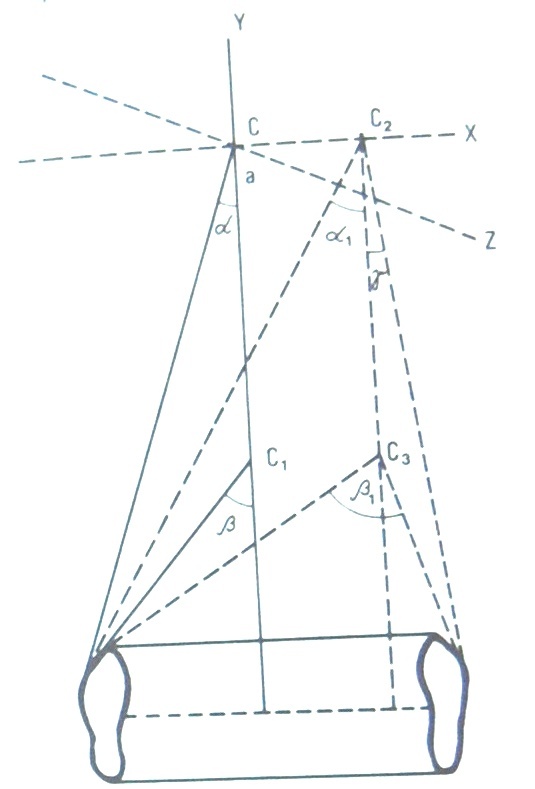
Obr. 66 Změny úhlu stability pro různé polohy těžiště
Rovnováha je porušena v okamžiku, kdy se těžnice dostane mimo plochu opory (obr. 67).
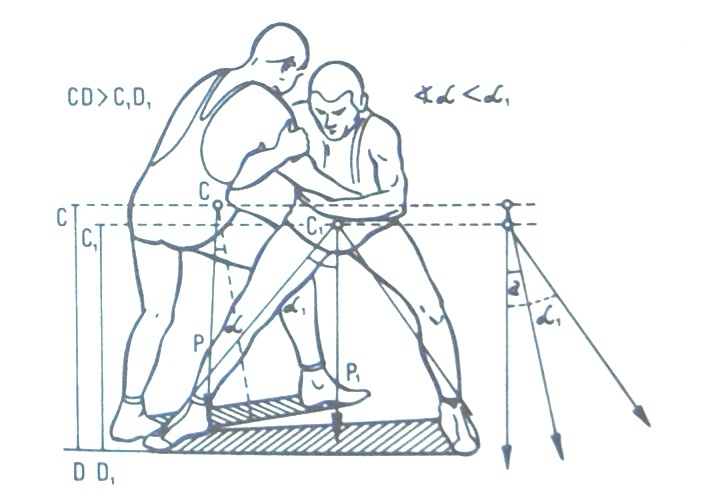
Obr. 67 Polohy těžnice vzhledem k opoře
Výška těžiště nepřímo úměrně ovlivňuje stabilitu, což znamená, že čím je těžiště výš, tím si udržení rovnovážného postoje vyžaduje větší svalovou sílu.
Při vyvedení protivníka z rovnováhy je také třeba mít na paměti, že stabilita závisí nejen na velikosti opěrné báze a výšce těžiště, ale i na hmotnosti zápasníka. V soutěžích jsou zápasníci rozděleni do kategorií podle hmotnosti, přesto tím nejsou rozdíly zcela kompenzovány. Japonci jsou v zápase velmi dobří, zejména ve schopnosti porušit protivníkovu rovnováhu, což je v zápase podstatné. Využívají přitom pomyslného rovnoramenného trojúhelníku, který jim naznačí, kterým směrem je protivníka nejsnazší vyvést z rovnováhy (obr. 68).
Obr. 68 Znázornění pomyslného rovnoramenného trojúhelníku
Je třeba si uvědomit, že tyto podmínky stability jsou oproti realitě zjednodušené. Při zápase nejde o stabilitu ve statických, ale v dynamických podmínkách. Závisí tedy na okamžitém pohybu soupeře a z toho vyplývající opory, kterou protivník jistým způsobem vytváří. Takže i když je opora podložky neměnná, neustále se mění opora protivníka v určité výšce. Například někdy se těžnice dostane příliš vpřed mimo opěrnou bázi zápasníka, ten však nespadne, protože síla reakce protivníka hraje roli pohyblivé opory v prostoru (obr. 69).
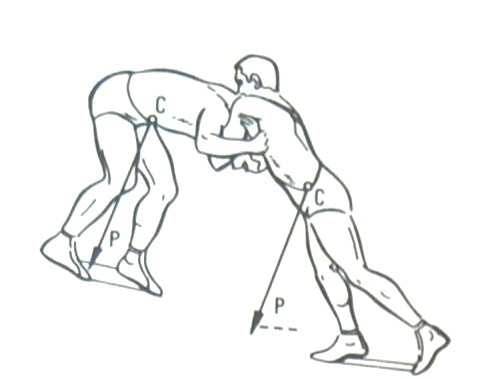
Obr. 69 Vliv síly reakce protivníka na udržení rovnováhy
V zápase také často dochází k situacím, kdy jeden soupeř zvedne druhého. V tom případě je pro stojícího zápasníka velmi obtížné udržet rovnováhu. Stabilita se snižuje, protože vzniká soustava zápasní-zápasník, která má společné těžiště poměrně vysoko. Úhel stability nad společnou plochou opory je proto malý (obr. 65). Navíc zvednutý soupeř se snaží svými pohyby porušit rovnováhu. Stojící zápasník se musí snažit s využitím vestibulárního aparátu a svalové síly udržet rovnováhu, větším rozkročením nebo přemístěním nohy ve směru narušení rovnováhy. Kromě těchto činností také stojící zápasník musí vyrovnávat pohyby soupeře přenosem hmotnosti v opačném směru než soupeř, což je podmíněno optimální kontrakcí a relaxací daných svalových skupin.
Vedle zápasu je to judo, kde hraje rovnováha a její udržení klíčovou roli při překonání soupeře. Každým specifickým pohybem v judu působí útočník svalovou silou na soupeře. Velikost, směr a doba jejího působení určují hybnost, která je přenesená na soupeře. Z pohledu biomechaniky představuje míra stability a potřebná síla tahu na vyvedení soupeře z rovnováhy základní determinanty úspěchu v judu. Mechanické faktory ztráty rovnováhy představují následující parametry vstupující do pohybových rovnic (Nowoisky, 2005):
Ø Síla útočníka ve směru pohybu
Ø Úhel mezi silou útočníka a směrem pohybu
Ø Okamžitá úhlová rychlost těžiště soupeře
Ø Poloha těžiště soupeře
Ø Hmotnost soupeře
Ø Úhel mezi vertikálou a spojnicí osy otáčení a těžiště oponenta
Ø Plocha opory soupeře
Ø Moment setrvačnosti (zahrnuje v sobě antropometrické parametry)
Z výčtu těchto parametrů vyplývá, že útočník může ovlivnit rovnováhu soupeře především velikostí a směrem působící síly. Další parametry může ve velké míře ovlivnit soupeř.
Dynamická rovnováha, D´Alembertův princip
V průběhu pohybu prochází lidské tělo mnoha na sebe navazujícími mikrofázemi. Optimální provedení pohybu je i zde podmíněno rovnováhou a to rovnováhou dynamickou. Tělo přechází z jedné mikrofáze do druhé, tedy z jedné dynamické rovnováhy do druhé dynamické rovnováhy.
Platnost dynamické rovnováhy je založena na d´Alembertově principu, to znamená, že pracuje se setrvačnými silami. Setrvačná neboli d´Alembertova (též doplňková) síla FS vzniká vždy při zrychleném či zpomaleném pohybu. Tato síla působí proti směru zrychlení a její velikost je rovna součinu hmotnosti tělesa a zrychlení. A zde platí, že soustava působících sil doplněná o d´Alembertovu sílu je v rovnováze. D´Alembertův princip bývá také formulován tak, že při pohybu mechanické soustavy jsou setrvačné síly v rovnováze s explicitními silami. Matematicky tuto rovnováhu vyjádříme:
 .
.
Totéž platí pro rovnováhu momentů sil, přičemž započítáváme i momenty setrvačných sil MS:
 .
.
Moment setrvačnosti
Moment setrvačnosti je skalární fyzikální veličina, která charakterizuje rozložení látky v tělese vzhledem k ose otáčení, vyjadřuje tedy míru setrvačnosti tělesa při otáčivém pohybu. Rotující těleso má tím větší setrvačnost, čím má větší hmotnost a čím je tato látka tělesa dál od osy otáčení. Moment setrvačnosti je dán vztahem:
 ,
,
kde m1, m2,…, mn jsou hmotnosti jednotlivých bodů, z nichž se těleso skládá ar1, r2,…,rn vzdálenosti bodů od osy otáčení. Jednotkou je kilogram metr na druhou (kg·m 2).
Díky tomu, že lidské tělo často mění vzájemnou polohu segmentů během pohybu, mění se tím rozložení hmoty vzhledem k dané ose otáčení. I když se tedy osa otáčení nemění, s pohybem jednotlivých segmentů se může měnit velikost celkového momentu setrvačnosti těla.
Nejmenší moment setrvačnosti je vždy ten, který vztahujeme k ose otáčení procházející těžištěm tělesa. Velikost momentu setrvačnosti vzhledem k rovnoběžné ose, ležící ve vzdálenosti a od osy procházející těžištěm určíme pomocí Steinerovy věty:
 ,
,
kde m je hmotnost tělesa.
Obrázek 70 ukazuje několik základních poloh lidského těla s hodnotami momentů setrvačnosti.
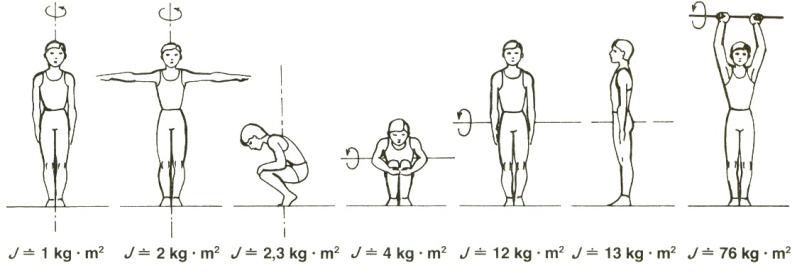
Obr. 70 Momenty setrvačnosti lidského těla (dle Hochmuta, 1974 a Donského, Zaciorského, 1979 in Karas a kol., 1990)
Energie otáčivého pohybu
Víme, že těleso o hmotnosti m, které koná posuvný pohyb, má kinetickou energii
 .
.
Kinetickou energii však má také těleso, které se otáčí s úhlovou rychlostí ω vzhledem k dané ose. Matematickými úpravami získáváme vztah pro kinetickou energii tělesa při otáčivém pohybu:
 ,
,
kde J je moment setrvačnosti.
Koná-li těleso současně posuvný i otáčivý pohyb, je celková kinetická energie tělesa rovna jejich součtu:
 .
.
Některé kopy s výskokem nebo akrobatické prvky jsou příkladem pohybové struktury složené jak z posuvného, tak i rotačního pohybu. Uveďme jako příklad pro jednoduché a srozumitelné vysvětlení salto vpřed, které se v některých bojových uměních objevuje v různých obměnách. Při saltu se těžiště sportovce pohybuje v letové fázi po křivce šikmého vrhu vzhůru a současně jeho tělo rotuje kolem volné osy otáčení procházející jeho těžištěm. Celková kinetická energie je tedy rovna součtu kinetické energie posuvného a otáčivého pohybu, jak výše matematicky vyjadřuje uvedený vztah.
Taktéž zde platí zákon zachování energie, do něhož zahrnujeme přeměny i na kinetickou energii otáčivého pohybu. Vraťme se k příkladu salta vpřed, přičemž zanedbáme přeměny na vnitřní energii. Sportovec při rozběhu či nákroku získává kinetickou energii posuvného pohybu, která je těsně před odrazem největší. V odrazové fázi se tato energie částečně přemění na potenciální energii pružnosti svalů dolních končetin, které se na odraze podílejí. Odrazová fáze probíhá tak, aby způsobila rotaci těla sportovce. Po dokončení odrazu má tedy jeho tělo kinetickou energii posuvného pohybu, protože těžiště se pohybuje po parabolické křivce, a kinetickou energii otáčivého pohybu díky rotaci těla kolem příčné osy procházející těžištěm v letové fázi. S rostoucí výškou těžiště se kinetická energii posuvného pohybu částečně přeměňuje na potenciální polohovou energii, když pak tělo klesá, dochází k opačné přeměně. Při doskoku, kdy sportovec musí zastavit svůj pohyb, se jeho pohybová energie přeměňuje na potenciální energii pružnosti svalů a následně na vnitřní energii sportovce i podložky, což v této fázi již zanedbat nemůžeme.
Moment hybnosti (točivost)
Moment hybnosti je vektorová fyzikální veličina, která bývá nazývána též točivost. Charakterizuje pohybový stav otáčejícího se tělesa, je tedy obdobou hybnosti u posuvného pohybu. Moment hybnosti se nejčastěji značí L, jeho jednotkou je kilogram metr na druhou za sekundu (kg.m2.s-1).
Moment hybnosti je určen vektorovým součinem:
 ,
,
kde r je polohový vektor a p hybnost. Moment hybnosti však můžeme také určit pomocí momentu setrvačnosti J a úhlové rychlosti ω:
 .
.
Platnost tohoto vztahu dokládáme matematickým odvozením:
 .
.
2. Impulsová věta, zákon zachování momentu hybnosti
Působí-li na těleso moment síly M, dochází na základě 2. Newtonova zákona ke změnám momentu hybnosti L. Matematicky tuto skutečnost vyjádříme:
 .
.
Po rozepsání můžeme též psát:
 .
.
Levá strana rovnice vyjadřuje impuls momentu síly, neboli rotační impuls, pravá strana je moment hybnosti získaný působením vnější síly na nějakém rameni. Příkladem je salto vpřed, kdy ve fázi odrazu působí po nějakou dobu t moment síly M a jako časový účinek vzniká otáčivý pohyb, tělo má tedy určitou točivost.
Otáčivý účinek tedy vzniká pouze působením vnější síly. Platí tudíž zákonitost, že u lidského těla nemůžeme za letu pouhým působením vnitřních sil přivodit trvalé otáčení.
Tento poznatek shrnuje 2. Impulsová věta:
Časová změna momentu hybnosti tělesa je rovna výslednému momentu síly působící na těleso.
Odtud vyplývá velmi důležitý důsledek – zákon zachování momentu hybnosti. Stejně jako zákon zachování hybnosti lze i tento zákon zachování odvodit z 3. Newtonova zákona.
Formulujeme ho následovně:
Je-li vzhledem k některému bodu soustavy výsledný moment vnějších sil působících na danou soustavu nulový, pak celkový moment hybnosti vzhledem k uvažovanému bodu se zachovává.
Zákon zachování hybnosti tedy říká, že v izolované soustavě se celkový moment hybnosti s časem nemění.
Podívejme se na konkrétní důsledky tohoto zákona při tělesných cvičeních, kdy změnami momentu setrvačnosti těla můžeme regulovat rychlost otáčení. Vraťme se ještě jednou k saltu. Při odrazu získal sportovec moment hybnosti
 ,
,
který už v letové fázi nemůže měnit. Určitými pohyby však může měnit poměr jednotlivých složek točivosti J aω. Čím se sportovec v saltu víc sbalí, tím víc přiblíží hmotu svého těla k ose otáčení, tudíž zmenší moment setrvačnostiJ. Kolikrát se zmenší tento parametr, tolikrát se zvětší úhlová rychlost otáčení ω, protože součin J∙ω vyjadřující moment hybnosti musí mít konstantní hodnotu (obr. 71). Podmínkou je, aby pohyb sbalení proběhl ve stejném směru, jako je směr otáčení celého těla.
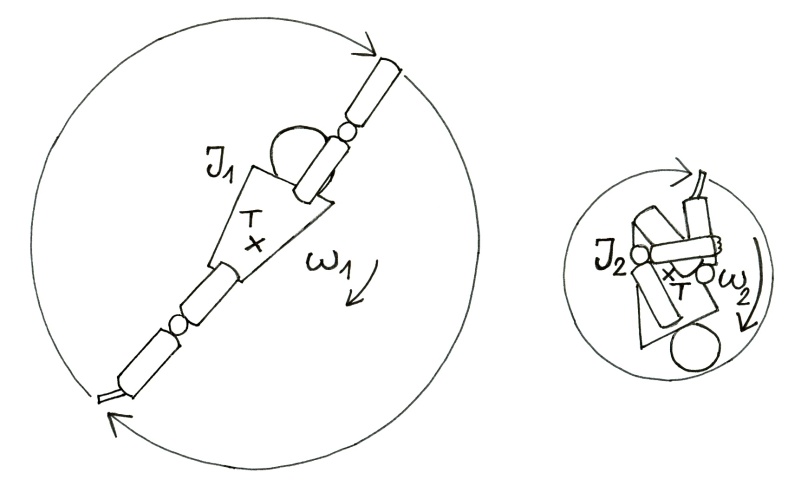
Obr. 71 Zákon zachování momentu hybnosti u salta
Zákon zachování momentu hybnosti tyto změny matematicky vyjadřuje:
 , tedy
, tedy
 .
.
Uvedli jsme příklady, kdy pohyby způsobující změny momentu setrvačnosti probíhaly ve stejném směru, jako byl směr získané točivosti. Setkáváme se však i s jinými případy. Již výše u zákonu zachování hybnosti jsme uvedli, že v bezoporové fázi pohybu vnitřní síly nemají vliv na změnu dráhy nebo na změnu rychlosti těžiště. Zmínili jsme, že pohyb jednoho segmentu těla v bezoporové fázi pohybu vyvolá pohyb jiného segmentu těla opačným směrem. To znamená, že součet všech impulsů vnitřních sil v izolované soustavě (čímž tělo volně se pohybující v prostoru je) je vždy rovný nule. Je to aplikace zákona akce a reakce. Uveďme příklad. Jestliže ve výskoku již v letové fázi sportovec přednoží, vzniká otáčivý pohyb kolem osy procházející kyčelními klouby, tedy impuls momentu síly M je akcí. Jako reakce vzniká stejně velký impuls opačného směru -M, který se projeví otáčivým pohybem jiného segmentu, v tomto případě je to pohyb horních končetin do předpažení současně s předklonem trupu (obr. 72).
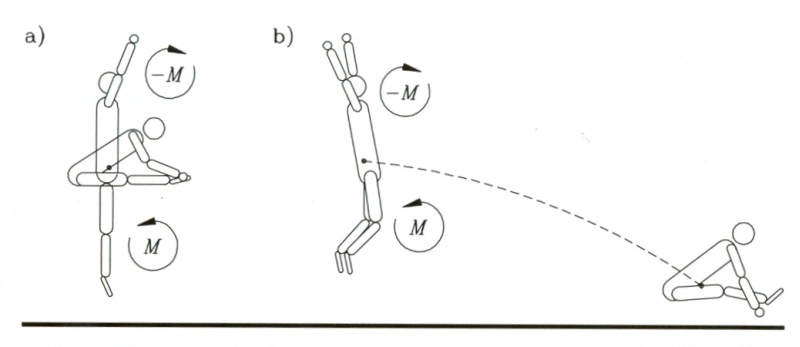
Obr. 72 Zákon zachování momentu hybnosti (převzato od Kassat, 1993)
Konkrétním příkladem této platnosti v úpolech může být „double front kick break“ (obr. 73).

Obr. 73 Double front kick break
Bodem, ke kterému se tyto pohyby vztahují, je vždy těžiště. Na základě vztahu mezi impulsem momentu síly a momentem hybnosti platí také
 .
.
Odtud dostáváme
 .
.
Tento vztah potvrzuje platnost již uvedeného tvrzení, že v izolované soustavě zůstává součet momentů hybností roven nule (tzn., v letové fázi nemůžeme žádnými pohyby dát vznik trvalému otáčení těla), může se pouze zvětšovat moment hybnosti určitých segmentů na úkor segmentů jiných.
Rotační pohyb těla na místě a přenosy rotačních momentů jsou v judu nazývány Tai Sabaki. Z biomechanického pohledu mohou být tyto pohyby rozděleny na
pohyby se zachováním momentu hybnosti a s variabilním momentem hybnosti. V prvním případě působí na systém pouze vnitřní síly, v druhém případě jsou tu
i vnější síly způsobující rotace. Vzpomeňme, že platí
 . Zvýšení rychlosti rotace je z fyziologického hlediska podmíněno zvýšením napětí agonistických svalů způsobujících rotaci a současným snížením napětí
antagonistů. Ze zákonu zachování momentu hybnosti vyplývá, že úhlovou rychlost je možné zvětšit zmenšením momentu setrvačnosti.
. Zvýšení rychlosti rotace je z fyziologického hlediska podmíněno zvýšením napětí agonistických svalů způsobujících rotaci a současným snížením napětí
antagonistů. Ze zákonu zachování momentu hybnosti vyplývá, že úhlovou rychlost je možné zvětšit zmenšením momentu setrvačnosti.
Moment hybnosti, jakožto schopnost tělesa zachovat otáčivý pohyb, je důležitou proměnnou u kopů s rotací celého těla. Moment hybnosti se v izolované soustavě zachovává. To pro praxi znamená, že polohou těla můžeme ovlivnit rychlost rotace. Jak tuto zákonitost můžeme aplikovat na techniky bojových umění. Vzpomeňme si, jak důležitou roli hraje zrychlení. Takto je možné vhodnými pohyby segmentů těla rychle měnit rychlost. Jestliže začnete rotaci s dolními i horními končetinami daleko od těla a pak je náhle přitáhnete, začnete rotovat mnohem rychleji. Tak například, z otevřeného postoje můžete v kung fu provést kop zvaný beduín, známý též jako butterfly kick (obr. 74). Soupeř si bude myslet, že má dostatek času, aby provedl obloukový kop. Když však útočník náhle přitáhne končetiny k tělu, zrychlí svou rotaci natolik, že je schopen zasáhnout soupeře dřív, než to čekal.

Obr. 74 Butterfly kick
Tato změna úhlové rychlosti na základě změny momentu setrvačnosti je rozhodující i u dalších u obtížnějších kopů jako např. 540 Round House (obr. 75).

Obr. 75 540 round house kick
Porovnáme-li vzorce pro posuvný a otáčivý pohyb tělesa, vidíme jistou analogii. Hmotnost m u posuvného pohybu je nahrazena momentem setrvačnosti J u pohybu otáčivého, stejně tak rychlost v je nahrazena úhlovou rychlostí ω, zrychlení a úhlovým zrychlením ε, síla F momentem síly M, hybnost p momentem hybnosti L. Přehled ukazuje následující tabulka 3.
Tab. 3 Analogie vzorců pro posuvný a otáčivý pohyb
|
posuvný pohyb |
otáčivý pohyb |
||
|
dráha |
s |
úhlová dráha |
φ |
|
rychlost |
v |
úhlová rychlost |
ω |
|
zrychlení |
a |
úhlové zrychlení |
ε |
|
hmotnost |
m |
moment setrvačnosti |
J |
|
síla |
F |
moment síly |
M = r x F |
|
1. impulzová věta |
ma = ∑F |
2. impulzová věta |
Jε =∑M |
|
kinetická energie |
½ mv2 |
kinetická energie |
½ Jω2 |
Ráz těles
Ráz neboli srážka těles je výsledek vzájemného působení dvou či více těles, při kterém dochází ke kontaktu jejich povrchů. Můžeme tedy říct, že srážky jsou podstatou úpolových sportů a bojových umění. Při řešení problému rázu obvykle na základě známého rozložení hmotností soupeřů a jejich segmentů, jejich rychlostí,mechanických vlastností a pohybových stavů před rázem, hledáme rychlosti, deformace, nárazové síly a momenty během rázu i po něm. Využíváme přitom zákon zachování energie a impulsové věty, tedy zákon zachování hybnosti a zákon zachování momentu hybnosti.
Průběh rázu závisí na vzájemném pohybu daných segmentů před rázem. Podle toho rozlišujeme přímý ráz, při kterém vektory relativních rychlostí leží na společné ose. Pokud na stejné ose neleží, jedná se o ráz šikmý.
Dále je průběh rázu závislý na vlastnostech materiálů, které ovlivňují vznik deformací. Po nárazu deformační síly mizí a v závislosti na pružnosti materiálu buď dojde k návratu do původního tvaru, nebo zůstává trvalá deformace. Podle toho rozlišujeme dvě krajní možnosti: dokonale pružný ráz a nepružný ráz těles. V reálu se většina srážek nachází mezi těmito dvěma extrémy.
Přiblížíme si základní druhy srážek:
Pružná srážka
Platí při ní impulsové věty i zákon zachování mechanické energie. To znamená, že celková kinetická energie srážejících se těles je stejná před i po srážce. Díky dokonalé pružnosti těles tak nedochází k žádným přeměnám kinetické energie na vnitřní energii. V tomto případě tedy neuvažujeme třecí a odporové síly působící proti směru pohybu. Těleso se po srážce může pohybovat jinou rychlostí jiným směrem. Jde-li o středový náraz, přerozděluje se kinetická energie posuvného pohybu (obr. 76). Uveďme jednoduchý příklad dvou koulí, pro jejichž přímou srážku platí rovnice:

 .
.
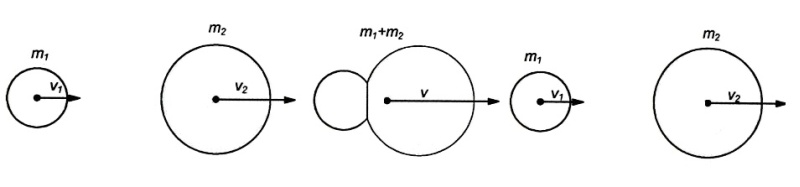
Obr. 76 Středový pružný ráz těles
Může jít však také o šikmý neboli excentrický ráz, při kterém rázové síly neprochází těžištěm alespoň jednoho tělesa. Jsou-li povrchy těles v tomto případě dostatečně drsné, kinetická energie posuvného pohybu se částečně mění i na kinetickou energii rotačního pohybu.
Nepružná srážka
U nepružných srážek platí pouze zákon zachování hybnosti a zákon zachování momentu hybnosti. Mechanická energie se zde nezachovává - část se jí mění na energii vnitřní nebo se spotřebovává na překonání třecích a odporových sil. Platnost impulsových vět vyjadřují rovnice:
 .
.
Srážky v úpolových sportech považujeme ve velké míře za srážky nepružné, ať už jde o údery nebo o chvaty, kdy jeden soupeř chytne během srážky druhého a dál se již pohybují spolu (obr. 77).
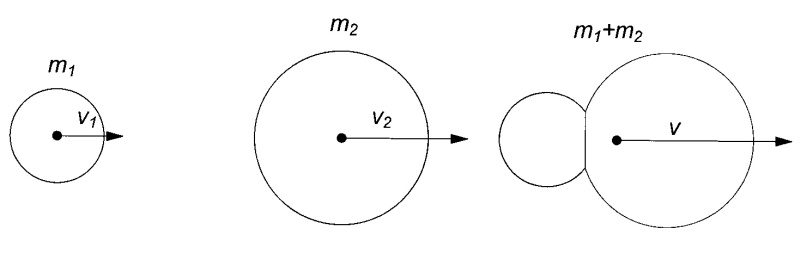
Obr. 77 Středový nepružný ráz těles
Při nepružných srážkách dochází díky deformaci k přeměně části energie na vnitřní energii. Uvažujme těleso o hmotnosti m1 pohybující se rychlostí v1 a těleso o hmotnosti m2 (paže) pohybující se rychlostí v2 těsně před nárazem. Množství energie způsobující deformaci, tedy množství mechanické energie, které se přemění na vnitřní energii, můžeme vyjádřit následně:
kde e je koeficient restituce, který udává, jak pružná srážka je.
Pro dokonale pružný ráz nabývá činitel restituce hodnoty 1. To znamená, že všechna kinetická energie jdoucí do srážky se i po srážce projeví jako mechanická energie, rychlost druhého tělesa bude po srážce stejná, jako byla před srážkou rychlost prvního tělesa, všechna energie se tedy předá, na vnitřní energii se nic nepřemění. Pro dokonale nepružný ráz má hodnotu koeficient restituce hodnotu 0, z čehož vyplývá, že se všechna mechanická energie před srážkou přeměnila na vnitřní energii. Ráz skutečných těles není ani dokonale pružný, ani zcela nepružný, ale nachází se někde mezi těmito krajními případy - takový ráz bývá označován jako nedokonale pružný nebo částečně pružný.
Rychlost se ve vztahu pro kinetickou energii objevuje v druhé mocnině. To znamená, že rychlost má na velikost energie větší vliv než hmotnost. Řekněme, že se hmotnost zvětší třikrát. Tedy i kinetická energie vzroste třikrát. Ale jestliže rychlost bude třikrát větší, kinetická energie vzroste devětkrát (32). To vysvětluje, proč jsou lidé s dlouhými končetinami schopni snadněji skórovat. V rovnici pro kinetickou energii i hybnost se veličina rychlosti objevuje okamžitá rychlost posuvného pohybu. To znamená, že jde o rychlost v okamžiku nárazu, kterou jde noha přímo na cíl, například na hrudník. Kopající dolní končetina může být u obloukového kopu vnímaná jako poloměr kružnice, kterou opisuje při pohybu noha. Pohyb po kružnici můžeme vyjádřit také úhlovou rychlostí. Při kopu nataženou dolní končetinou budou mít všechny její části stejnou úhlovou rychlost. Avšak obvodová rychlost neboli lineární rychlost nohy bude větší než kolene – v závislosti na vzdálenosti daného segmentu od středu otáčení, čímž je kyčelní kloub. Z toho vyplývá, že vzdálenějším segmentem (nohou) můžeme druhého udeřit s větší kinetickou energií, proto mají výhodu lidé s delšími dolními končetinami. Na základě toho můžeme říct, jaká je jedna z výhod použití zbraně. Při úderu koncem zbraně je přenášeno větší množství kinetické energie vedoucí k většímu poškození cíle. Čím tedy bude rychlost daného segmentu či zbraně větší, tím více energie bude přeneseno do tělesa, na které je útok směřován. Tato energie koná práci W, kterou můžeme vyjádřit jako součin síly F a dráhy s, po které síla působí. V případě přerážení desek dojde působením síly k jejich prohnutí a je-li toto prohnutí (dráha, po které síla působí) dostatečně velké, dojde k přelomení. Těmito úvahami jsme potvrdili, že maximální rychlost je prvotní podmínkou tvrdého úderu.
Hybnost je tím, co je přenášeno z jednoho těla na druhé při jejich kontaktu. Důležitou věcí je fakt, že hybnost se vždy zachovává. To znamená, že všechna hybnost přenášená jedním tělem je absorbovaná tělem druhým. Při srážce platí, že síla nárazu je rovna změně hybnosti v čase, což nás vede k další podstatné veličině – impulsu síly. V případě srážky tvrdých těles zrychlí jedno těleso druhé rychle, dojde tedy k působení velké síly během krátkého časového úseku. Při srážce měkkých těles se hybnost mezi tělesy předává delší dobu, působí tak menší síla. Rozdílná doba přenosu hybnosti a tedy i rozdílná velikost síly v daném okamžiku vysvětluje, proč údery měkkými částmi těla méně bolí než údery tvrdšími částmi těla, např. klouby.
Jsou dva základní druhy kopů – pushing kicks – přerážející neboli silové kopy a snapping kicks - švihové kopy. Mezi silové kopy patří přímé kopy jako cut kick, front kick a back kick. Hlavním cílem těchto kopů je uvést do pohybu soupeřovo tělo. Hlavní rovnicí je tedy F = ma, kdy je snahou použít sílu takovým způsobem, aby bylo uděleno soupeřovu tělu zrychlení. Čím bude hmotnost soupeře větší, tím menší zrychlení mu náraz udělí. Nicméně díky impulsu síly můžeme říct, že čím kratší bude doba kontaktu útočníka se soupeřem, tím větší bude změna jeho hybnosti. Kratší doba kontaktu při nárazu tak umožňuje odkopnout soupeře dál. Mezi tyto kopy můžeme zařadit i kop apcha jirugi v taekwondu (obr. 78). Tento kop se používá při přerážejících technikách nebo jako sebeobranná technika. Úderovou plochou je bříško chodidla. Pro maximální sílu kopu je důležitý správný nápřah. Koleno kopající DK je v momentě nápřahu zdvižené směrem k hrudníku a až potom následuje samotný kop. Aby byl kop dostatečně silný, zapojují se do práce nejsilnější svalové skupiny (boky a stehna) a používá se celá hmotnost těla se současným mírným záklonem trupu.
V případě těchto silových kopů je změna hybnosti jakožto vektoru dána také pohybem soupeře. Jestliže se pohybuje proti kopu, je následná změna hybnosti při nárazu větší, neboť se vektorově sčítají hybnosti obou soupeřů.
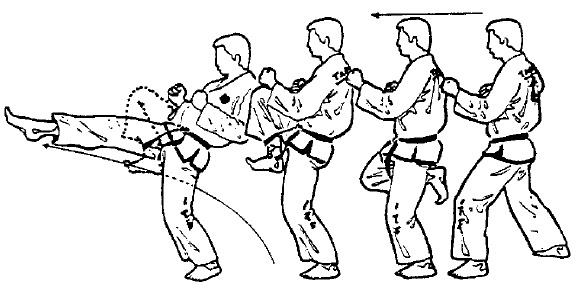
Obr. 78 Apcha Jirugi – přerážející kop vpřed (převzato od Miklóš a kol., 2002)
U kopů se přenáší nejen hybnost, ale i energie. Ve spojitosti s ní se objevuje důležitá veličina - výkon, která vyjadřuje množství předané energie za jednotku času. Přenos energie je to, co je skutečně podstatné u snapping kicks, jako například u roundhouse kick - obloukový kop (obr. 79).
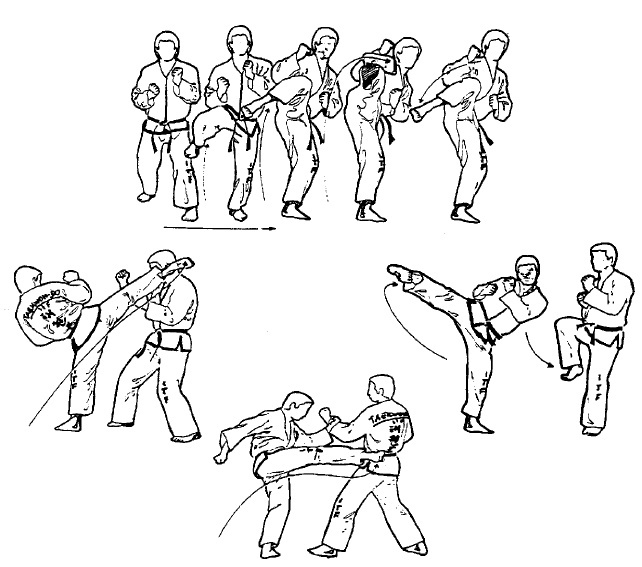
Obr. 79 Dollyo Chagi – obloukový kop (převzato od Miklóš a kol., 2002)
Ve chvíli, kdy při obloukovém kopu dopadne noha na hrudník soupeře, předá mu kinetickou energii. Část kinetické energie nohy se přemění na tepelnou energii a zvuk a zbytek energie proniká do soupeřova těla. Je to právě energie, která způsobuje poškození, ne síla nebo hybnost. Energie je tedy také např. příčinou přeražení desek.
Ukažme si konkrétní výpočet přeražení desek, jestliže máme dané tyto vstupní údaje (Halliday a kol., 2000):
Mistr karate zlomil jediným úderem (hmotnost ruky je asi m1 = 0,70 kg) dřevěnou desku o hmotnosti 0,14 kg. Totéž provedl s betonovou dlaždicí o hmotnosti 3,2 kg. Tuhost k pro pružný ohyb desky má hodnotu 4,1·104 Nm-1 a pro dlaždici 2,6·106 Nm-1. Deska praskne v okamžiku, kdy je prohnuta o d = 16 mm, u dlaždice stačí prohnutí o pouhý 1 mm. Jaká je pružná energie při deformaci desky a dlaždice bezprostředně před zlomením?
Pružný průhyb nosníku je popsán Hookovým zákonem. Podle vztahu má tedy jeho deformační energie hodnotu
 .
.
Pro desku pak platí
 .
.
Pro dlaždici je
 .
.
Jaká musí být nejmenší rychlost ruky před úderem, aby se deska, resp. dlaždice zlomila?
Srážku považujeme za dokonale nepružnou. Dále předpokládáme, že se mechanická energie soustavy ruka + deska během pružného ohybu desky zachovává a že společná rychlost ruky i desky je bezprostředně před prasknutím desky nulová.
Ze zákona zachování mechanické energie při ohybu desky je zřejmé, že kinetická energie soustavy ruka + deska na samém počátku ohybu je shodná s její
elastickou energií těsně před zlomením. Tato hodnota činí 5,2 J pro dřevěnou desku a 1,6 J pro betonovou dlaždici. Rychlost dopadající ruky musí být
dostatečná k tomu, aby soustava ruka + deska měla po dokonale nepružné srážce potřebnou kinetickou energii. Nejprve vypočteme společnou rychlost V soustavy ruka + deska na počátku ohybu. Vyjdeme z rovnosti kinetické energie a elastické energie a dostaneme
 , tj.
, tj.
 .
.
Dosazením hodnot pro dostaneme pro desku
 .
.
Pro dlaždici je
 .
.
Označme písmenem v rychlost ruky těsně před dopadem na desku či dlaždici. Srážka je popsána vztahem
 , ze kterého úpravou dostaneme
, ze kterého úpravou dostaneme
 .
.
Pro desku dostáváme
 .
.
Pro dlaždici
 .
.
Aby se zlomila dlaždice, musí být úder ruky asi o 20 % rychlejší než u dřevěné desky. Vlivem větší hmotnosti dlaždice se na zvýšení vnitřní energie soustavy spotřebuje větší část původní kinetické energie ruky než v případě dřevěné desky.
Nakayama (1989) shrnuje faktory, které nejvíc ovlivňují sílu nárazu v karate. Všechny musí fungovat současně, aby pomohly maximalizovat sílu:
1. Velikost síly – velikost síly závisí na průřezu svalu a počtu zapojených svalových vláken.
2. Směr síly – síla by měla směřovat kolmo k povrchu cíle.
3. Rychlost – čím větší je rychlost, tím větší je i síla. Jestliže se zvětší hmotnost segmentu nebo rychlost, zvětší se i hybnost. Čím je tato hybnost větší, tím je větší i síla nárazu.
4. Rozsah pohybu – síla je přímo úměrná vzdálenosti, ze které se ruka či noha přibližuje k cíli. S větší vzdáleností roste dráha, po které může segment zrychlovat a dosáhnout větší konečné rychlosti a tedy i síly.
5. Stabilita – stabilní postoj a optimální držení těla je nezbytné pro účinné použití síly.
My bychom k těmto faktorům ještě přidali velikost plochy kontaktu – s minimalizací této plochy roste tlak, který určuje velikost deformačních účinků nárazu.